Inhaltsverzeichnis
2017 Andrej Scherf
| Title | Design of a haptic manipulator for ankle joint motions |
|---|---|
| Titel | Entwicklung eines haptischen Manipulators für Knöchelbewegungen |
| Supervisor | M.Sc. Christian Schumacher, Dr.-Ing. Philipp Beckerle |
| Autor | Andrej Scherf |
| Department | FB 16 Mechanical Engineering |
| Last Revision | 30.10.2017 |
| Status | Finalized |
Introduction/Motivation
In the current age, the interaction of robotic devices with humans, becomes increasingly important, e.g. for the development of active prosthesis. In order to improve the performance and development of these devices, mechanisms of human and its behaviour have to be better understood. However, a comprehensive understanding of these areas is yet not available. One approach in research, that aims to fill in this gap of knowledge employs simulation models to describe human behaviour.
These simulations are developed by analysing biomechanical data, the development of kinematic models and by observing of the interaction forces acting on the human body. Acquired insights, gained by data analysis, can be used for a better understanding of neuromuscular mechanisms in the human body or e.g. for an improvement of simulation models and therefore advance the development and performance of robotic devices.
One approach in research for investigating biomechanical response of humans involves the use of haptic systems. These haptic devices provide the possibility of human-machine-interaction within a controlled setting of the environment. Unforeseen changes, e.g. by perturbations, of this interaction could provide the possibility to investigate the subject’s response behaviour and thereby give more insights in the mechanisms proceeded in the human body. In the case of sudden changes in the environment, one suggestion is, that neuromuscular reflex mechanisms are used to create appropriate and fast reactions. A simplified model of this mechanism is described as a feedback loop from muscle sensors to muscle actuation, as it can be seen in (Geyer et al., 2003). If this model is accurate, the following question arises: Is it possible to use a haptic device to investigate such reflex mechanisms?
Changes of the environment by the haptic devices can be for example accomplished by manipulating of
motions of the human body. Especially joints quantify to fulfil this task, since they provide a proper
application of artificial force into the body. One joint, that was used in research before (Quinlivan et al., 2017; Wöhrl, 2010; Ferris et al., 2006) and offers a good opportunity for an easy manipulation and interaction, is the ankle joint. This joint acts mostly
as a hinge joint, has therefore only one degree of freedom and conducts only two motions, namely plantar–
and dorsiflexion of the foot (Tillmann, 2006). Hence it appears to be the most suitable interaction point to investigate
the neuromuscular reflex mechanisms through the use of haptic devices. In previous studies (Quinlivan et al., 2017; Wöhrl, 2010; Ferris et al., 2006) haptic devices have already been developed, and results indicated that humans adjusts their muscle
activity and their physiology to environmental changes. Nevertheless these devices were aiming towards
on an assistance of the subject. This work in contrary aims to develop a new haptic device, which provides
the possibility to interact with the subject’s ankle joint by implying unforeseen changes or perturbations.
This device should provide a basis to gain a better understanding of the neuromuscular reflex mechanisms
and allow further improvements of the simulations, that describe them.
Methods
Here the methods used in this elaboration of designing and evaluating a haptic devices
for manipulating ankle joint motions are presented. To get a suitable solution for this task, it was necessary to apply
a structured development process. This process is decribed in the first part. Second the used methodlogy to evaluate the developed system is presented.
Product development techniques and systems engineering
For designing a new system or product, it is crucial to pursue a generic procedure. Since the system, that had to be developed in this work was a mechatronic system, a process offered by the V model adopted from software development and adapted to the requirements of mechatronics was used (VDI 2206, 1997).
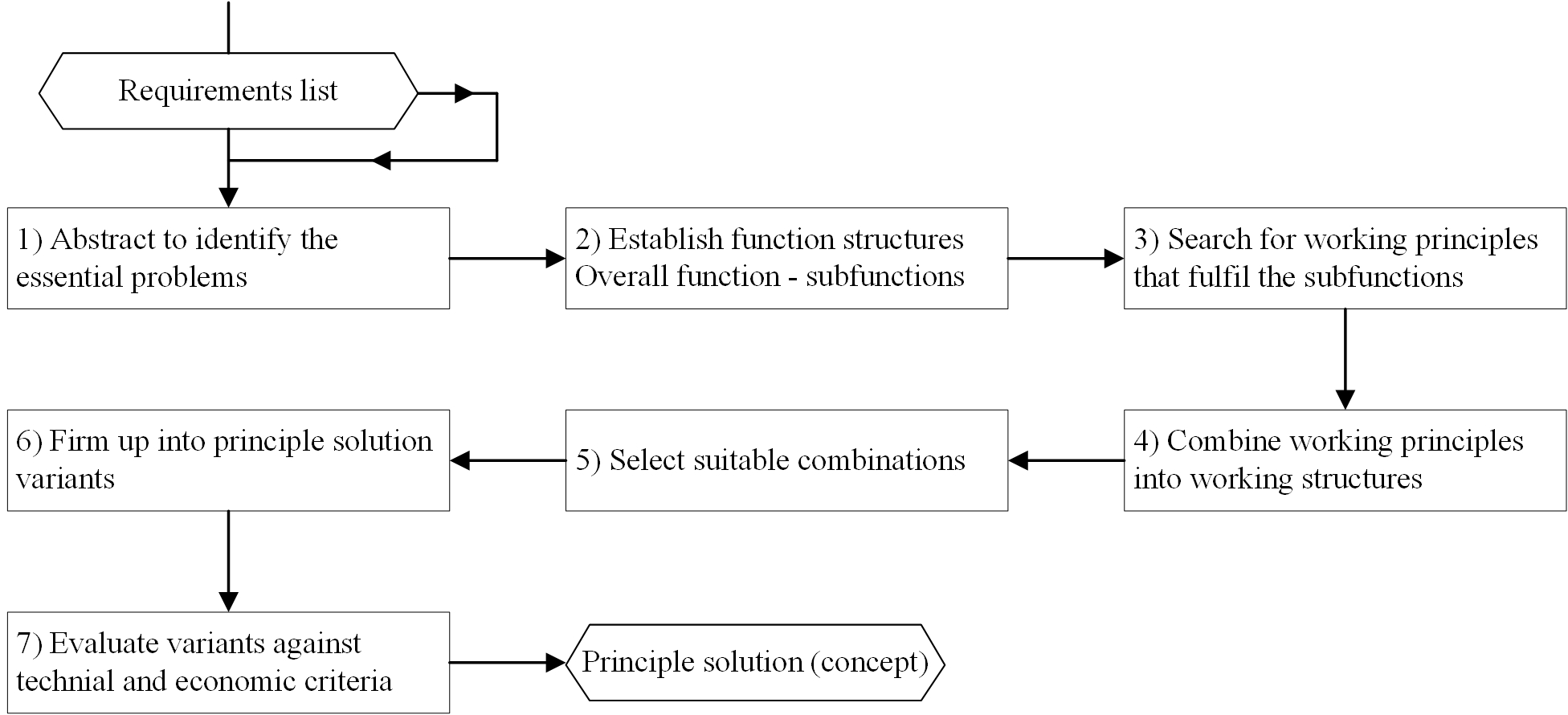
The conceptual design, first part of the V model, was a major component of the development
of the haptic ankle manipulator. It can be broken down into smaller individual working steps (Pahl, G, 2007), which are shown in Figure 1. The acquisition of a requirements list, based on specifications and the given task was the first step. Then
essential problems of the task and the requirements were identified and a function structure of the system
was established. Through search of working principles and combination of those to working structures, a
morphological structure was gained. Then suitable combinations were selected and firmed up into solution
variants. At the end of the conceptual design these solution variants were evaluated and a principle solution
concept for the haptic ankle manipulator was obtained. For a more detailed descripction of the conceptual design Engineering design:
a systematic approach by Pahl, Gerhard is recommended
Test design and test protocol

In this work the system was tested with one male subject (86 kg, 185 m). The subject was equipped with seven EMG surfaces electrodes (6 on the muscle, 1 reference electrode). The electrodes were placed over the muscle belly of the following muscle for both legs:
- musculus tibialis anterior (TA),
- caput mediale des musculus gastrocnemius (MG),
- musculus soleus (SOL).
The signals were amplified with a factor of 1000 and sampled with a frequency of 2000 Hz by the EMG system Bagnoli 16 (Delsys INc., Natick, USA) The subject had to wear shoes with TD–TO sensors (FSR 406, Interlink Electronics Inc., Westlake Village, USA) and the foot attachment. In order to obtain kinematics of the subjects lower limbs, five reflective markers were attached to the subject right leg on the following positions:
- knee joint,
- ankle joint,
- calcaneus (heel),
- fifth metatarsus bone (MT5),
- first phalanges distales (toe).
Marker positions were measured with 500 Hz by a four-camera infrared system (Qualisys, Gothenburg, Sweden)). The subject was hopping on a force plate (Kistler Holding AG, Winterthur, Switzerland), with a measuring frequency of 2 kHz.
The test time for every experiment was set to 45 s. The EMG system, the motion capturing system and the force plate were triggered by the haptic ankle manipulator. A scheme of the experimental setup is shown in Figure 2.
In the first part of the test protocol the subject was hopping with detached actuation on the force plate. This part was done, to obtain a comparison between the measured ankle angle by the shape sensor and the motion capturing system, as well as the TD–TO detection by the FSR sensor and the force plate. Here nine experiments were performed.
In the second part of the test protocol the actuation was attached to the subject via bowden cables. As the trial started and the subject was placed on the force plate, the actuation system first established a pretension force of 5 N. After this force was reached, the subject started hopping with preferred frequency and height. During the test time, three randomized hops were perturbed (see scheme in Fig.2). Here the actuation pulled activly on the ankle of the subject after mid-stance. The applied force was set to 80 N. This evaluation part was done to compare ankle angle captured by the motion capturing system and muscle activity gained by the EMG system, for the respective conditions.
Data obtained by the camera system, the force plate and the haptic ankle manipulator was digital filtered
with a forth order zero-lag low-pass filter and a cut-off frequency of 11 Hz. The EMG data was numerically
rectified and low-pass-filtered with a fourth order zero-lag filter with a cut-off of 6 Hz. Correctness of filters
were checked by comparison with raw data signals. All data was then time-interpolated to 2 kHz.
For analysing data a strategy was chosen, where the experiments were divided into individual hops and
time normalized from TD to TD.
Results
At this point, only the most important results of this thesis are summarized. First of all, results of the product development, the actual design of the haptic ankle manipulator are presented. Second the ankle angle with and without perturbations as well as the muscle activity for the Musculus Soleus are presented.
Haptic ankle manipulator – Design

In Figure 3 the chosen concept, which was the most suitable one, according to the Cost-Benefits analysis, is shown. This concept describes a free hopping motion with off-board actuation. The generation of torque is provided by an electric motor with a gear box. This torque is transformed into an interaction force by using a pulley system with an attached bowden cable. This bowden cable is connected to the subject. Here a foot or shoe attachment provides the interaction force to the foot and the generation of an artificial ankle torque, respectively. Furthermore the bowden cable housing is fixed on its two end points, to allow the relative movement and transmission of force. Here a fixation point on the shank of the subject is provided. Measuring force and ankle angle, a strain gauge force sensor and a shape sensor are used. The concept is also shown in a photograhy with the attached system to the subject standing on the force plate, as it is also schematic shown in Figure 2.
The components used for the haptic ankle manipulator are listed below:
- Aluminium frames for mounting
- 2x Brushed DC motors RE-30 (Maxon Motor Ag., Sachseln, Switzerland)
- Aluminium pulley with radius of 0.029 m
- Bowden cable and 3D printed attachment to the shank
- Foot attachment with straps
- Encoder ENC MR 500 (Maxon Motor Ag., Sachseln, Switzerland)
- Shape sensor S700 (Measurand Inc., Fredericton, Canada)
- Force sensor (unknown manufacture)
- Pressure sensor (FSR 406, Interlink Electronics Inc., Westlake Village, USA)
System evaluation

Figure 3 displays the averaged ankle angles for non-perturbed and perturbed hops of eleven experiments. The angles are normalised to the hop progression from TD to TD and are obtained by the motion capturing system. The non-perturbed ankle angle is presented by the blue curve. The angle decreases after TD till mid-stance. Afterwards it increases again, with an oscillating motion in the flight phase. Moreover the ankle angles for the perturbed hops one, two and three are displayed as green, red and magenta curves, respectively. Here, the values are averaged over the according perturbed hops. These angles perform approximately the same motion as the non-perturbed angle.
All ankle angles oscillate around an angle of 96.28°. The amplitude of the non-perturbed angle amounts here to 24°. It can be seen, that the ankle angles for the perturbed hops are higher after the TO (black dash line). The values are 3.4°, 2.2° and 1.8° for hop one, two and three, respectively. Furthermore the perturbed angles have a 0.77° lower value at the mid-stance. However, all perturbed ankle angles are largely in the standard deviation of the non-perturbed ankle angle, except hop one.
The ankle angle had slightly changes in its trajectory with occurring perturbations. Right before the TO and slightly afterwards, the perturbed hops had higher values. One possible reason might be changing of the ankle joint kinematics, due to the perturbations. However, it is also possible, that the ankle angle for perturbed hops is higher at the TO, because the induced force here still increased. It can be seen, that the angles were located in the standard deviation of the non-perturbed ankle angles, and therefore it can be assumed, that the perturbations had no or only a minor influence on the ankle angle. In contrary (Ferris, 2006) showed that the ankle angle at TD and the ankle angle displacement increased for inducing an additional force or passive structure, respectively. However (Ferris, 2006) used a passive system and therefore it is not entirely comparable to this system.

Figure 4 displays the EMG signal for the musculus soleus. As the TD occurs the muscle starts activation after 15% of the overall hop time. Approximately at the mid-stance it has its maximum (0.5) and then decreases again till TO. Here the SOL has no significant activation. It can be seen, that the perturbed hop and the hop before the perturbation are nearly the same and slightly (0.06) higher than the average value in the mid-stance. Here the activation for the hop after the perturbation is 0.16 points higher than the signal for non-perturbed hops. Nevertheless all activation signals are located in the standard deviation. Signals for Musculus gastrocnemius and Musculus tibialis anterior are not shown here, but have similar properties.
Comparing the obtained signals to Zuur, 2010 and Ferris, 2006 it can be seen, that the general trajectory and
height of the muscle activity signals, as well as the position of the TO were similar.
However it can be seen, that in Zuur, 2010, Ferris, 2006 and in Wöhrl, 2010 the muscle activity adjusted to the environmental
changes and decreased. In contrary muscle activity in this work had not or only slightly adjustments to
the perturbations. All muscle signals for the perturbations were located in the standard deviation of the
averaged EMG signal of the non-perturbed hops.
A possible solution to this contradiction, is the fact, that in other work the environmental changes were
permanent (Ferris, 2006) or over a longer period of time (Wöhrl, 2010). Hence, the human organism has longer time to adjust
its activity. In contrary, in this work a single perturbation of a short period of time was applied. Therefore
this inducement of force can be too short to cause significant muscle activity changes. That would indicate,
that humans controls the hopping motion more deliberate than through reflex mechanisms. Additionally,
results from Wöhrl, 2010 indicated, that human adjust their muscle activity more by a mechanical than through
sensoric feedback. This would indicate, that muscle activity could not be influenceable by short changes
of the environment.
Conclusion
In this work, a new developed haptic devices for ankle joint manipulation was given. Fundamentals of working principles of the human muscle structure, neuromuscular reflex mechanisms and basic biomechanics of human hopping mechanism were outlined.
Using system engineering methods, requirements were established and a function structure describing the system was created. The system was subdivided into functional principles and various partial solutions were combined and evaluated in order to gain the most suitable system design.
Hardware components including a tripod and a main frame, consisting of aluminium frames were combined to a scaffold for actuation units and electronics. Several sensors were chosen and attachments for the subject’s lower legs and feet were designed, sewed and 3D-printed. Electronic components for gathering sensors data, providing actuation signals and setting up an Ethernet connection to the host–pc were selected and the necessary software to carry out these functions in a real–time environment were designed and implemented. The trajectory for target force, angle and shaft angular velocity was obtained and a switching controller algorithm for different task was established.
The new developed haptic devices was evaluated using test methods and a test protocol. Using this test design, the performance of the system, as well as the biomechanical response of the subject was tested. It was shown, that this device provides the opportunity to manipulate ankle joint motions and that the used sensors for touchdown and take–off detection approves to be suitable. Measurements of the ankle angle using shape sensors were compared to those obtained by motion capturing. This emphasized, that the attachment and calibration of the shape sensor were problematic and the values of ankle angle using this method compared poorly to those measured using motion capturing and to those used in other research projects. Measurement of the ankle angle using shape sensors would therefore not be recommended for future developments and alternative sensor technologies should be used.
The performance of the controller and the actuation unit was investigated, while providing perturbations
forces. It was indicated that the actuation unit reached its limits for the chosen force. This could be due
to high friction in the system or due to the controller algorithm used. However, as an initial prototype the
controller was acceptable. Nevertheless further adjustments of the controller algorithm should be carried
out, if this haptic device is to be developed further in future work. Furthermore, it is imperative that the
actuation unit be changed in future work, as the current unit is too weak to provide the higher forces.
The power of the motor used in this project is much lower to those used in other research projects which
suggests that upgrading to a more powerful actuation unit may provide a large potential for improvement.
The evaluation of the biomechanical data analysis showed no significant changes in muscle activity. This
either indicated, that muscle response was not influenced by short perturbations at all, or that the chosen
perturbation parameter were not suited. Comparison to other work, where muscle activity changes occur,
showed that the chosen applied force for the perturbation may be too low. This is an indicator to change the
controller and actuation unit in future work. The change in ankle stiffness could not be sufficient explained,
as it did not correspond with other work. In future work, however, this issue should be investigated.
This work provide a system, which is capable of manipulating the ankle motion of humans with unforeseen
changes of the environment. Nevertheless in this configuration of the haptic ankle manipulator, it is not
completely possible to investigate neuromuscular reflex mechanisms in the human lower limbs. Despite the
results of the muscle activity and the ankle stiffness, the developed haptic ankle manipulator provides an
adequate basics for future work. The possibility to change components and software algorithms easily, as
well as the design’s ability to be used whilst performing different tasks, e.g. walking, and the comfortable
interaction with the subject are the main advantages of this system.
Outlook
- Overcome system limitations
- Ankle angle measurement with different systems, e.g. IMU
- Improvement of controller algorithm and/or actuation unit
- Testing more subjects with different target trajectroies
Bibliography
Asbeck, Alan T. ; De Rossi, Stefano M. ; Galiana, Ignacio ; Ding, Ye ; Walsh, Conor J.: Stronger, smarter, softer: next-generation wearable robots. In: IEEE Robotics & Automation Magazine 21 (2014), Nr. 4, S. 22–33
Bear, Mark F. ; Connors, Barry W. ; Engel, Andreas ; Held, Andreas ; Hornung, Cathrine ; Jarosch, Birgit ; Lange, Christina ; Maxam, Gudrun ; Niehaus-Osterloh, Monika ; Paradiso, Michael A. u. a.: Neurowissenschaften: Ein grundlegendes Lehrbuch für Biologie, Medizin und Psychologie. Spektrum Akademischer Verlag, 2008
De Marées, Horst ; Mester, Joachim: Sportphysiologie. Bd. 2. Diesterweg, 1991
Dean, Jesse C. ; Kuo, Arthur D.: Energetic costs of producing muscle work and force in a cyclical human bouncing task. In: Journal of Applied Physiology 110 (2011), Nr. 4, S. 873–880
Farley, Claire T. ; Blickhan, Reinhard ; Saito, Jacqueline ; Taylor, C R.: Hopping frequency in humans: a test of how springs set stride frequency in bouncing gaits. In: Journal of applied physiology 71 (1991), Nr. 6, S. 2127–2132
Farley, Claire T. ; Morgenroth, David C.: Leg stiffness primarily depends on ankle stiffness during human hopping. In: Journal of biomechanics 32 (1999), Nr. 3, S. 267–273
Ferris, Daniel P. ; Bohra, Zaineb A. ; Lukos, Jamie R. ; Kinnaird, Catherine R.: Neuromechanical adaptation to hopping with an elastic ankle-foot orthosis. In: Journal of Applied Physiology 100 (2006), Nr. 1, S. 163–170
Geyer, Hartmut ; Seyfarth, Andre ; Blickhan, Reinhard: Positive force feedback in bouncing gaits? In: Proceedings of the Royal Society of London B: Biological Sciences 270 (2003), Nr. 1529, S. 2173–2183
Hill, Archibald: The heat of shortening and the dynamic constants of muscle. In: Proceedings of the Royal Society of London B: Biological Sciences 126 (1938), Nr. 843, S. 136–195
Hobara, Hiroaki ; Kanosue, Kazuyuki ; Suzuki, Shuji: Changes in muscle activity with increase in leg stiffness during hopping. In: Neuroscience letters 418 (2007), Nr. 1, S. 55–59
Kramer, Andreas ; Ritzmann, Ramona ; Gollhofer, Albert ; Gehring, Dominic ; Gruber, Markus: A new sledge jump system that allows almost natural reactive jumps. In: Journal of biomechanics 43 (2010), Nr. 14, S. 2672–2677
Lee, Sangjun ; Crea, Simona ; Malcolm, Philippe ; Galiana, Ignacio ; Asbeck, Alan ; Walsh, Conor: Controlling negative and positive power at the ankle with a soft exosuit. In: Robotics and Automation (ICRA), 2016 IEEE International Conference on IEEE (Veranst.), 2016, S. 3509–3515
Leukel, Christian ; Gollhofer, Albert ; Keller, Martin ; Taube, Wolfgang: Phase-and taskspecific modulation of soleus H-reflexes during drop-jumps and landings. In: Experimental brain research 190 (2008), Nr. 1, S. 71–79
McDonagh, Martin J. ; Duncan, Audrey: Interaction of pre-programmed control and natural stretch reflexes in human landing movements. In: The Journal of physiology 544 (2002), Nr. 3, S. 985–994 61
Moritz, Chet T. ; Farley, Claire T.: Human hopping on very soft elastic surfaces: implications for muscle pre-stretch and elastic energy storage in locomotion. In: Journal of Experimental Biology 208 (2005), Nr. 5, S. 939–949
Mugge, Winfred ; Abbink, David A. ; Schouten, Alfred C. ; Dewald, Julius P. ; Helm, Frans C. van der: A rigorous model of reflex function indicates that position and force feedback are flexibly tuned to position and force tasks. In: Experimental brain research 200 (2010), Nr. 3-4, S. 325–340
Mugge, Winfred ; Abbink, David A. ; Schouten, Alfred C. ; Helm, Frans C. van der ; Arendzen, JH ; Meskers, Carel G.: Force control in the absence of visual and tactile feedback. In: Experimental brain research 224 (2013), Nr. 4, S. 635–645
Mulder, Mark: Haptic gas pedal feedback for active car-following support. (2007)
Pahl, Gerhard ; Beitz, Wolfgang ; Feldhusen, Jörg ; Grote, Karl-Heinrich: Engineering design: a systematic approach. Springer Science & Business Media, 2007
Quinlivan, BT ; Lee, S ; Malcolm, P ; Rossi, DM ; Grimmer, M ; Siviy, C ; Karavas, N ; Wagner, D ; Asbeck, A ; Galiana, I u. a.: Assistance magnitude versus metabolic cost reductions for a tethered multiarticular soft exosuit. In: Science Robotics 2 (2017), Nr. 2, S. eaah4416
Raburn, Caroline E. ; Merritt, Kristen J. ; Dean, Jesse C.: Preferred movement patterns during a simple bouncing task. In: Journal of Experimental Biology 214 (2011), Nr. 22, S. 3768–3774
Rinderknecht, Stephan: Mechatronic Systems II. https://moodle.tu-darmstadt.de/mod/ resource/view.php?id=201893. 2016. – [Online; accessed 08-September-2017]
Roth, Karlheinz: Konstruieren mit Konstruktionskatalogen: Band 1: Konstruktionslehre. Bd. 1. Springer-Verlag, 2011
Schmidt, Robert F. ; Thews, Gerhard: Physiologie des Menschen. Springer-Verlag, 2013
Seyfarth, André ; Geyer, Hartmut ; Herr, Hugh: Swing-leg retraction: a simple control model for stable running. In: Journal of Experimental Biology 206 (2003), Nr. 15, S. 2547–2555
Tillmann, Bernhard: Atlas der Anatomie des Menschen: mit Muskeltrainer. Springer-Verlag, 2006
VDI: VDI 2222: Methodic development of Solution principles. In: VDI Gesellschaft Produkt-und Prozessgestalung Duesseldorf (1997)
VDI: VDI 2206: Design methodology for mechatronic systems. In: VDI-Gesellschaft Produkt- und Prozessgestaltung, Duesseldorf 2206 (2004)
Wöhrl, Toni F. ; Seyfarth, PD Dr A. ; Grimmer, Sten: Humane Anpassungsstrategien an parallele Fußgelenksteifigkeiten. (2010)
Winter, David A.: Biomechanics and motor control of human movement. John Wiley & Sons, 2009
Young, Kelly A. ; Wise, James A. ; DeSaix, Peter ; Kruse, Dean H. ; Poe, Brandon ; Johnson, Eddie ; Johnson, Jody E. ; Korol, Oksana ; Betts, J. G. ;Womble, Mark: Anatomy & Physiology. OpenStax College, 2013. – [Online; accessed 14-September-2017]. – ISBN 1938168135
Zhang, Juanjuan ; Fiers, Pieter ; Witte, Kirby A. ; Jackson, Rachel W. ; Poggensee, Katherine L. ; Atkeson, Christopher G. ; Collins, Steven H.: Human-in-the-loop optimization of exoskeleton assistance during walking. In: Science 356 (2017), Nr. 6344, S. 1280–1284 62
Zhao, Gouping: Real-time Control of Actuated Systems. https://moodle.tu-darmstadt.de/mod/ resource/view.php?id=243085. 2016. – [Online; accessed 08-October-2017]
Zuur, Abraham T. ; Lundbye-Jensen, Jesper ; Leukel, Christian ; Taube, Wolfgang ; Grey,
Michael J. ; Gollhofer, Albert ; Nielsen, Jens B. ; Gruber, Markus: Contribution of afferent
feedback and