Inhaltsverzeichnis
QFM13 Einfluss der Krafteinwirkung auf die Muskelaktivität
| Modul-Icon | … |
|---|---|
| Veranstaltung | Seminar Quantitative Forschungsmethoden |
| Thema | Einfluss der Krafteinwirkung auf die Muskelaktivität |
| Autoren | Filip Cengic, Dennis Dahms |
| Bearbeitungsdauer | ca. 30 min |
| Letzte Bearbeitung | 28.01.2015 |
| Status | fertig |
Anmerkung: Im Rahmen des Seminars Quantitative Forschungsmethoden ist es nicht prüfungsrelevant die Syntax der MatLab Programme zu lernen. Die Fragen beziehen sich lediglich auf die Inhalte dieses Wikis und beinhalten NICHT das Grundlagen Wiki zum EMG.
Motivation
Die Muskelaktivität ist seit Galvanis ersten Experimenten gegen Ende des 18. Jahrhunderts erfassbar. Dank enormer technischer Fortschritte im 20. Jahrhundert ist die technische Anwendbarkeit eines EMG-Erfassungssystems das geringste Problem und essentieller Bestandteil der quantitativen Forschung. Ernsthafte Probleme treten bei der Auswertung des EMG-Signals auf, wo es darum geht, Artefakte und sonstige Störsignale zu eliminieren. Im Rahmen des B.A.L.A.N.C.E-Projekts wurden EMG Messungen durchgeführt, welche als Basis dieses Wiki-Eintrags dienen. In diesem Projekt wird das Muskelverhalten gegenüber externen Krafteinwirkungen (Perturbationen) am Sprung- und Hüftgelenk, sowie an der Schulter untersucht.
Auf Grundlage der im Rahmen des B.A.L.A.N.C.E-Projekts erhobenen Daten, werden die EMG-Signale einer Versuchsperson genauer verarbeitet und analysiert mit Hilfe von MatLab. #
verfasst von Filip
Das Experiment
Im aufrechten beidbeinigen Stand werden Drehmomente erzeugt, die dazu dienen das Gleichgewicht aufrechtzuerhalten. Damit dieses Gleichgewichtsverhalten genauer untersucht werden kann, wurden EMG-Elektroden an 10 verschiedenen Muskeln des Probanden angebracht. Dabei wurden Störungen am Sprung- und Hüftgelenk, sowie im Schulterbereich durchgeführt. Die drei Intensitätsstufen (10, 20, 30 N) traten in randomisierter Reihenfolge auf und wurden mittels einem Federmesser bestimmt. Bei der Krafteinwirkung am Sprunggelenk hob das betroffene Bein vom Boden ab. Dies gewährleistete, dass das Standbein in der Lage war, alle Drehmomente alleine zu kompensieren.
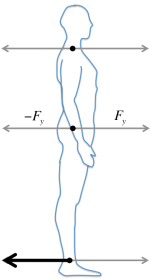
Für die Verarbeitung des EMG-Signals wurden die Daten des linken M. biceps femoris genauer untersucht. Die Sensorpositionen wurden nach den wissenschaftlichen Empfehlungen von SENIAM ausgewählt (Hermens et al., 1999). Die Applikation von Kräften erfolgte mittels einer Schnur, die an einer Fußmanschette zweiseitig (anterior/posterior) befestigt wurde. Durch einen Federmesser am Ende der Schnur konnte die Größe der Kraft ermitteltet werden. Im Rahmen dieser Untersuchung wird lediglich der Fall der posterior applizierten Störung berücksichtigt (s. Abb. 1).
Hypothese
Ein kurzes Beispiel soll den wissenschaftlichen Kontext aufzeigen wie eine Analyse erfolgen könnte. Die Arbeitshypothese lautet wie folgt:
- Bei einer posterioren Krafteinwirkung ist der M. biceps femoris aktiv.
Die Aufstellung der Nullhypothese wurde hierbei nicht berücksichtigt.
Grundlagen der Signalverarbeitung
„Die Erfassung und Verarbeitung des EMG setzt vertiefte Kenntnisse aus der Physiologie, Messtechnik, Informatik und ein hohes Maß an Eigenerfahrung voraus“ (Güllich, 2013, S.148). Aufgrund von diversen Störquellen und Einflussgrößen wird das Signal der
Muskelaktivität stets manipuliert (siehe Grundlagen Wiki zum EMG). Daher ist es erforderlich, bereits in der Planung von EMG-Messungen Vorkehrungen zu treffen,
um reliable und valide Signalverläufe zu gewährleisten. Dies kann weiterhin auch durch hardwareseitige Filterungsvorgänge (Amplifier, isolierte Kabel etc.) unterstützt werden. Im Rahmen dieser Arbeit liegt der Fokus jedoch auf der digitalen softwareseitigen Filterung, um fehlerbaftete Berechnungen zu vermeiden. (Zschorlich, 1987, S.66)
Dabei sollen folgende Fragen geklärt werden:
Wie können die Rohsignale positiv beeinflusst werden?
Welche Verfahren eignen sich gut?
Um das Grundverständnis zu stärken, wird zunächst eine Definition zu Filtern gegeben.
Filter dienen dazu, Eingangssignale (Rohsignale) nach individuell definierten Kriterien in ein Ausgangssignal zu überführen.Die Kriterien beinhalten Eigenschaften, in denen vorgegebene Signalsequenzen blockiert oder durchgelassen werden (Zschorlich, 1987, S. 66f).
In der Praxis haben sich Abläufe und Methoden herauskristallisiert, die in der vorgegebenen Reihenfolge die Besten Voraussetzungen liefern (Konrad, 2005, S. 25).
| 1 | Gleichrichten |
|---|---|
| 2 | Glättung |
| 3 | Filtern |
| 4 | Normalisierung |
Individuelle Erfahrungen des Lauflabors ergaben, dass sich beim Tausch der Arbeitsschritte zwei und drei, bessere Signalverläufe ergeben. Die einzelnen Auswertungsschritte werden nun genauer vorgestellt und am Beispiel von MatLab anwendungsspezifisch aufgeführt.
1. Gleichrichten
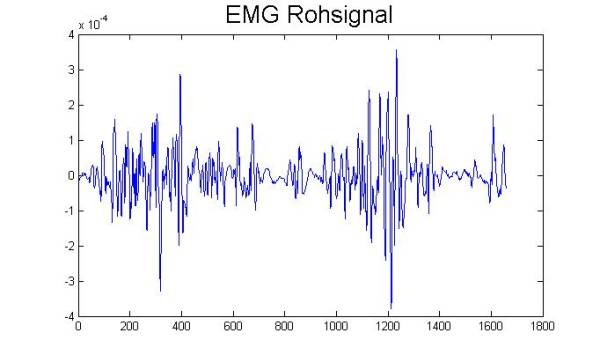
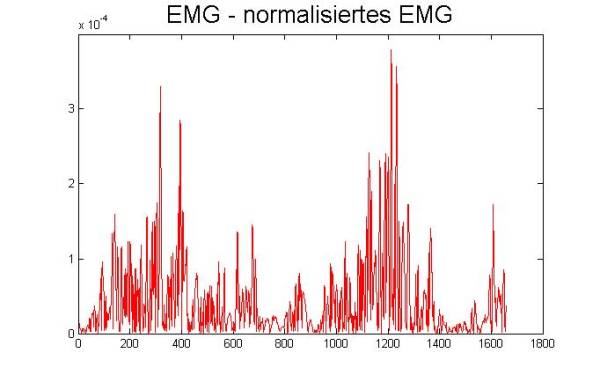
Die Ursprungssignale enthalten Amplituden, die die Nullinie unterschreiten. Durch Absolutwertbildung können alle negativen Werte in positive umgeschrieben werden, welches grafisch ein „umklappen“ bewirkt (siehe Abbildung 2 und Abbildung 3). Nun können mathematische Berechnungen an dem Signal, wie Mittelwert, Maximum und Minumum, durchgeführt werden (Konrad, 2005, S.26). <spoiler | Umsetzung in MatLab >
clc;
clear all;
load('KR10AL01.mat') % Datei mit Muskeldaten
% Muskel auswählen
muscle = (LVSM(1,12500:14500));
% % Arbeitsvariable für den Teilbereich erstellen
final = muscle(1,331:1988);
%% Normalisieren
figure;
% Ursprungssignal darstellen
plot(final);
hold on;
figure;
% Signal normalisieren
normalized_final = abs(final);
% normalisiertes Signal darstellen
plot(normalized_final,'r');
hold on;
</spoiler>
2. Glättung
Aufgrund des unruhigen Verlaufs des EMG´s und vereinzelten Aktivierungsspitzen wird schnell der Anschein erweckt, es handle sich um eine Kontraktion, welche hingegen nur Messfehler darstellen. Um diesem Effekt entgegenzuwirken, sollen mittels Glättungsverfahren eine Verlaufstendenz des Signals gegeben werden (Schewe, 2000, S. 227). Zwei Verfahren haben sich hierbei etabliert:
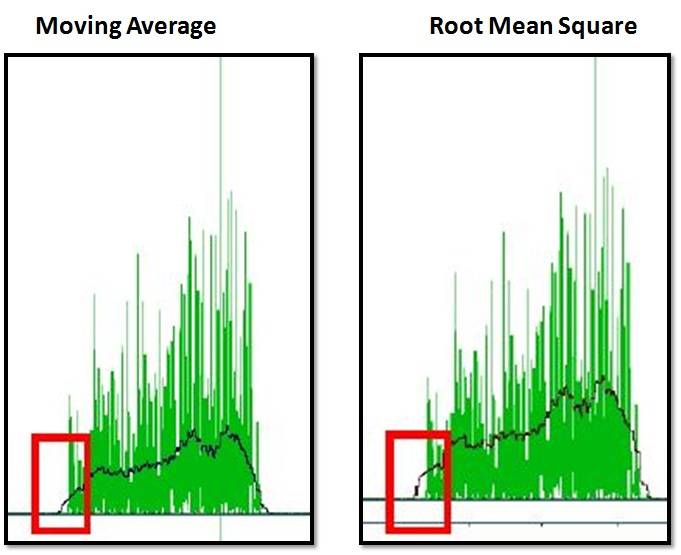
Gleitender Mittelwert (Moving average Filter):
Mit Hilfe eines individuell definierten Zeitfensters, werden die Amplitudenwerte gemittelt und konstant übers komplette Signal iteriert.
Root Mean Square Filter:
Dieser Algorithmus berechnet die mittlere Leistung des Signals, in dem jeder Amplitudenwert zunächst quadriert und anschließend die Wurzel gezogen wird.
In Abbildung 4 ist gut zu erkennen, dass sich beide Verfahren kaum unterscheiden. Beim genaueren hinsehen jedoch wird deutlich, das der Auschlag beim RMS-Verfahren deutlich höher ist als beim Moving Average Filter. Diese funktionellen Unterschiede sollten in den Auswertungen mit einbezogen werden.
<spoiler | Umsetzung in MatLab >
mavFiltMuscle = smooth(normalized_final,251,'moving');
%% DECLARATIONS AND INITIALIZATIONS
% Calculates windowed (over- and non-overlapping) RMS of a signal using the specified windowlength
% y = rms(signal, windowlength, overlap, zeropad)
% signal is a 1-D vector
% windowlength is an integer length of the RMS window in samples
% overlap is the number of samples to overlap adjacent windows (enter 0 to use non-overlapping windows)
% zeropad is a flag for zero padding the end of your data...(0 for NO, 1 for YES)
% ex. y=rms(mysignal, 30, 10, 1). Calculate RMS with window of length 30 samples, overlapped by 10 samples each, and zeropad the last window if necessary
% ex. y=rms(mysignal, 30, 0, 0). Calculate RMS with window of length 30 samples, no overlapping samples, and do not zeropad the last window
%
% Author: A. Bolu Ajiboye
function y = rms(signal, windowlength, overlap, zeropad)
delta = windowlength - overlap;
%% CALCULATE RMS
indices = 1:delta:length(signal);
% Zeropad signal
if length(signal) - indices(end) + 1 < windowlength
if zeropad
signal(end+1:indices(end)+windowlength-1) = 0;
else
indices = indices(1:find(indices+windowlength-1 <= length(signal), 1, 'last'));
end
end
y = zeros(1, length(indices));
% Square the samples
signal = signal.^2;
index = 0;
for i = indices
index = index+1;
% Average and take the square root of each window
y(index) = sqrt(mean(signal(i:i+windowlength-1)));
end
(Quelle: Copyright (c) Bolu Ajiboye, 2009 unter folgender URL: http://www.mathworks.com/matlabcentral/fileexchange/11871-signal-rms)
</spoiler>
3. Digitales Filtern
Die Bandbreite an Filtermethoden ist noch viel größer, sodass sich gegebenenfalls weitere Algorithmen zur Datenreduktion empfehlen. Zu Nennen sind hier vor allem der Lowpass, Highpass, Notch und Butterworth-Filter. Je nach Datensatz ist auch eine Kombination der Filter in der vorgegebenen Reihenfolge von Vorteil und sogar ratsam, da sie sich ergänzen. Dies wird deutlich, wenn man sich die Eigenschaften der Verfahren genauer betrachtet:
Lowpass-Filter: Dieser Filter bewirkt, dass lediglich Signale unterhalb des vorgegebenen Schwellwerts in die Analyse aufgenommen werden. Werte die sich oberhalb des Normwerts befinden werden ausgeschnitten.
Highpass-Filter: Im Gegenzug dazu, werden bei diesem Filter nur Daten oberhalb eines definierten Schwellwertes betrachtet, wohingegen Werte unterhalb des Schwellwertes außer Acht gelassen werden. Die Mischung aus den beiden Filtern (Low + High) werden Bandpaß-Filter genannt.
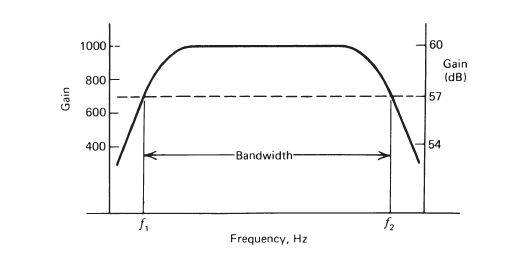
Notch-Filter: Bei der Verwendung von Messgeräten ist die Gefahr sehr groß, dass durch Netzfrequenzen das eigene Signal verzerrt wird. Mit Hilfe dieses Filters können bestimmte Frequenzen (beim EMG vorallem 50 HZ Rauschen) entfernt werden.
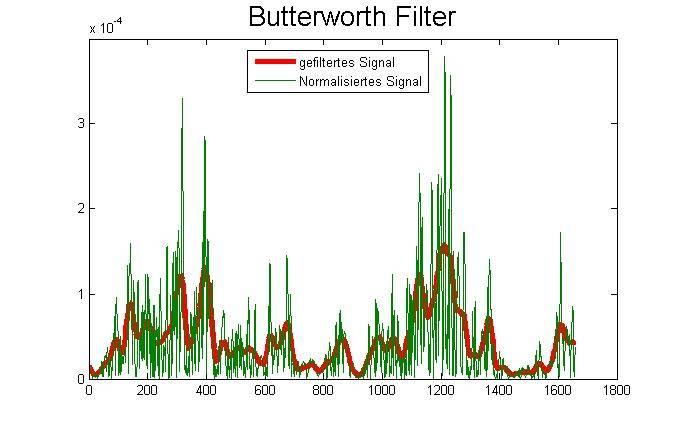
Butterworth-Filter: Durch die rekursive Anwendung dieses Filters wird das Signal mehrfach durchlaufen und bearbeitet. Dieser Filter nutzt dabei die Prinzipien des Lowpass- und Highpass-Filter für jede Iteration, sodass präziser auf Störungen reagiert wird.
Peak-Extracting-Filter: Mit Hilfe dieses Filters wird versucht einzelne Signalspitzen zu eliminieren, die aufgrund von Störungen entstanden sind. Momentan existieren hierfür keine implementierten Algorithmen, die beispielsweise in den Bibliotheken von MatLab aufgeführt sind. In Forschungsprozessen werden diese daher individuell entwickelt und auf das Versuchsdesign angepasst.
<spoiler | Umsetzung in MatLab >
%% Digitales Filtern
% High-Pass Filter
hpFilt = SPoleFilt(normalized_final, exp(-2*pi*10/2000),2,'high');
% Low-Pass Filter
hpFilt = SPoleFilt(normalized_final, exp(-2*pi*10/2000),2,'low');
% Butterworth Filter
sampling_frequency = 500;
cut_off_frequency = 10;
[B, A] = butter(2,cut_off_frequency/(sampling_frequency/2));
b_muscle = filtfilt(B,A,normalized_final);
---
function y = SPoleFilt(x, DecayRate, Method, Type);
%
% SPOLEFILT Filter input using a single pole recursive filter
%
% Y = SPOLEFILT(X, DECAYRATE, ...) low pass filters the sig-
% nal X using a IIR (infinite impulse response) single pole
% recursive filter. Basically, this filter acts as the digi-
% tal analogue to the electronic RC-filter. The DECAYRATE has
% a value between zero and one and determines how long it
% takes (in samples s) until 36.8% of the final value are
% reached: DECAYRATE = exp(-1/s). This can also be expressed
% in the -3dB cutoff frequency: DECAYRATE = exp(-2*pi*fc/fs),
% where fc is the cutoff frequency and fs is the sample
% frequency.
%
% Y = SPOLEFILT(X, DECAYRATE, METHOD, ...) additionally speci-
% fies a filter method:
%
% 1 - normal recursive using the matlab buit-in function
% FILTER.
% 2 - bidirectional recursive filter method using the
% function FILTFILT provided by the Signal Proces-
% sing Toolbox.
%
% If no METHOD is specified, method 1 is carried out.
%
% Y = SPOLEFILT(X, DECAYRATE, METHOD, TYPE) allows to choose
% between 'high' and 'low' pass filter.
%
% [Y, CalcTime] = SPOLEFILT(...) additionally returns the time
% it took to apply the filter.
%
% Recommendet reading: "THE SCIENTIST AND ENGINEER'S GUIDE TO
% DIGITAL SIGNAL PROCESSING" by S.W. Smith (available on-
% line for free at www.dspguide.com)
% -----------------------
% Input argument handling
% -----------------------
% output error message there are not 2 to 4 input arguments
error(nargchk(2,4, nargin));
% set method if not provided by the input
switch nargin
case 2, Method = 1; Type = 'low';
case 3, Type = 'low';
end
% ----------------------------
% Single Pole Recursive Filter
% ----------------------------
% get actual time
% set DSPGuide coefficients
switch Type
case 'low'
aDSPG = 1-DecayRate;
bDSPG = DecayRate;
case 'high'
aDSPG = (1+DecayRate)/2 * [1 -1];
bDSPG = DecayRate;
otherwise
error('Invalid filter type specified. Please select ''high'' or ''low''.')
end
% convert DSP-Guide coefficients to Matlab coefficients
b = aDSPG;
a = [1 -bDSPG];
% apply single pole recursive filter
switch Method
case 1, y = filter (b, a, x);
case 2, y = filtfilt(b, a, x);
otherwise
error('Invalid method specified. Please choose ''1'' (FILTER) or ''2'' (FILTFILT).')
end
if nargout==0
y=[];
freqz(b,a)
end
</spoiler>
Im wissenschaftlichen Forschungsprozess hat es sich als ratsam erwiesen, diese Verfahren kombiniert zu nutzen und individuell auf das Anspruchsniveau anzupassen.
4. Normalisierung
Ein Großteil des Hintergrundrauschens kann dem EMG-Signal mit den vorhergehenden Funktionen entzogen werden. Allerdings ist unklar in was für einem Verhältnis das im Mikrovolt gemessene (und verstärkte) Signal steht. Die grundsätzliche Idee bei der MVC-Normalisierung ist es, die Muskelaktivierung einem physiologisch relevanten Referenzwert anzupassen. Dafür muss vor dem jeweiligen Experiment die maximale Innvervationskapazität des betroffenen Muskels erfasst werden, diese bildet den MVC-Wert (Maximum Voluntary Contraction). Der hauptsächliche Effekt aller Normalisierungsroutinen ist es, dass die Amplitudendaten von Mikrovolt auf Prozente eines gewählten Referenzwertes reskaliert werden. Weitere mögliche Normalisierungsmethoden wären die Anpassung auf den Mittelwert oder zum höchsten Amplitudenausschlag (Konrad, 2005, S. 29). Der enorme Vorteil der Normalisierung besteht darin, dass intra- und interindividuelle Vergleiche möglich sind. Augrund der Tatsache, dass EMG´s auch tagesabhängig sind, lässt sich ein Vergleich mit derselben Person an unterschiedlichen Tagen durchführen. Ebenso der Vergleich zweier Probanden am gleichen Tag bestärkt die Analyse interindividueller Unterschiede. Nachteilig ist anzuführen, dass die Maßnahme mit der MVC-Normalisierung nur an gesunden und trainierten Sportlern durchführbar ist und somit häufig nur in der sportwissenschaftlichen Forschung ihre Anwendung findet.
Zwischenfazit
Die aufgeführten Arbeitsschritte machen deutlich, wie umfangreich EMG Daten aufgearbeitet werden müssen. Es wurden Lösungen aufgezeigt, die die Eliminierung von Störsignalen ermöglichen. Festzuhalten bleibt, dass das EMG lediglich die die Aktivierung der Muskeln symbolisiert, nicht jedoch die Kraft. Der Zusammenhang der Kraft und des EMG´s soll im folgenden Beispiel anhand unseres Beispiels genauer erklärt werden.
verfasst von Dennis
EMG-Auswertung & Interpretation
Die Perturbationen sind von 1-6 durchnummeriert (s. Abb. 3) und treten in folgender Reihenfolge auf: 20-10-30-20-30-10. Bei geringen Störungen (Perturbation 2, 6) des Gleichgewichts sind kaum Amplitudenerhöhungen des Muskel-EMGs festzustellen. Die Spitzenamplituden des EMG-Signals befinden sich im Bereich der Perturbationen 3 und 5, die Intensität der Krafteinwirkung betrug dort 30 N.
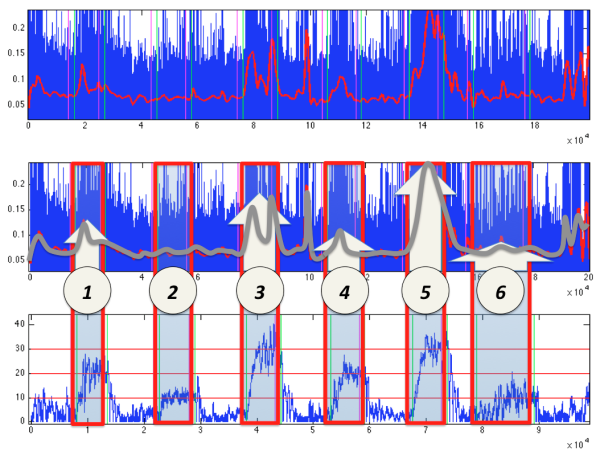
Man kann sehen, dass die Muskelaktivität im Verhältnis zur Krafteinwirkung steht. Grob kann man sagen, je stärker die externe Perturbation, umso höher die Muskelaktivität. Interessant wird es beim Amplitudenausschlag zwischen den Perturbationen 3 und 4. Die Frage, die sich stellt ist, liegt die Ursache in einer schlagartigen Zwischenzuckung der betroffenen Muskulatur oder handelt es sich um einen Fehler. Es ist von Störungen innerhalb des Systems auszugehen. Diese Artefakte resultieren aus dem Cross-Talk eines zerknickten EMG-Anschlusskabels, welcher die synchrone Bursts in den einzelnen EMG-Kanälen hervorruft.
Outline
Ein Zusammenhang zwischen Krafteinwirkung und Muskelaktivität besteht in jedem Fall. Im nächsten Schritt würde man die EMG-Werte weiterer Versuchspersonen in Betracht ziehen und diese auf einen Zusammenhang zwischen Aktivierung und Krafteinwirkung untersuchen. Im Rahmen des B.A.L.A.N.C.E-Experiments wurden die EMG-Werte von 10 Probanden erfasst. Es wäre ebenso interessant das Aktivitätsverhalten anderer Muskeln genauer zu betrachten, um ggf. weitere Zusammenhänge zu erschließen.
verfasst von Filip
Fragen
- Was ist der Unterschied zwischen dem Low- und Highpass-Filter? Worin könnte die Aufgabe eines Bandpass-Filters liegen?
- Welcher Zusammenhang ist beim Einfluss der Krafteinwirkung auf die Muskelaktivität festzustellen?
- Ist eine Normalisierung des EMG-Signals notwendig?
Literatur
Hermens, H. J., Freriks, B., Merletti, R., Stegeman, D., Blok, J., Rau, G., Disselhorst-Klug, C., Hägg, G. (1999). European Recommendations for Surface Electromyography. Results of the SENIAM project. Enschede, The Netherlands: Roessingh Research and Development.
Hoitz, F. (2014). Do Biarticular Muscles Respond to the Application of Horizontal Forces in the Sagittal Plane. Unveröffentlichte Bachelor Thesis. Darmstadt, Germany: Institute of Sports Science.
Güllich, A., & Krüger, M. (2013). Sport: Das Lehrbuch für das Sportstudium. Springer DE.
Konrad, P. (2005). EMG-Fibel. Eine praxisorientierte Einführung in die kinesiologische Elektromyographie. Jena, Germany: Department of Motion Science.
Schewe, H. (2000). Biomechanik: wie geht das?. G. Thieme.
Winter, D. A. (2009). Biomechanics and Motor Control of Human Movement. Hoboken, New Jersey: John Wiley & Sons, Inc.
Zschorlich, V. (1987). Elektromyographie und Dynamometrie in der Bewegungsforschung: ein systemanalytischer Ansatz zur Untersuchung der Bewegungskoordination. Czwalina.
Bewertung des Wiki-Moduls
| Kategorie | Dahms | Cengic | Anmerkungen |
|---|---|---|---|
| Inhalt (max. 10) | 07 Pkt | 07 Pkt | Aufstellen einer Arbeitshypothese, Erläuterung anhand eines Beispiels, kritische Betrachtung wünschenswert |
| Form (max. 5) | 04 Pkt | 05 Pkt | gute Übersichtlichkeit, Verlinkungen |
| Bonus (max. 2) | 01 Pkt | 0 Pkt | Matlab Beispiel-Code |
| Summe | 12 Pkt | 12 Pkt | 24 Pkt |
| Einzelbewertung | 12/15=80% | 12/15=80% | 24/30 = 80% |