Inhaltsverzeichnis
Hopping control for a spring-damper-mass-model using a central pattern generator
| Modul | 3M Seminar 2014 |
|---|---|
| Kategorie | 3M-Seminar 2014 |
| Autor | Sabrina Christoph, Birgit Schaefer, Tony Schmortte, Christian Schumacher |
| Betreuer | Prof. Dr. Andre Seyfarth, Dr. Rico Möckel |
| Bearbeitungsdauer | ca. 15 Minuten |
Introduction/Motivation
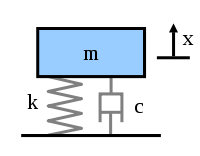
In locomotion central pattern generators (CPG) are used by the neuronal system to control movements with low effort and without sensory feedback from the peripheral nervous system (Ijspeert, 2008). Next to locomotion, CPGs in humans, invertebrate and vertebrate animals control activities like breathing or digesting (Ijspeert, 2008). They produce oscillating signals or patterns that can be used to stimulate muscle activity or to directly adjust mechanical parameters like joint angles or joint stiffness etc. (Sproewitz, 2008). Within this project the contribution of CPGs to control a hopping movement by changing mechanical properties will be simulated and investigated. Therefore, a simple spring-mass-model is implemented in Matlab Simulink (Mathworks, Natick, MA, USA). Since this model is energy conserving and produces stable hopping patterns for the right initial conditions, we additionally implemented a damper parallel to the spring (see Fig.1).

Then we used CPGs to change the spring properties (stiffness k and rest length l0) over time to control the systems behavior. Here, we aim to achieve a constant hopping height although a damper is included.
Podcast
The oscillation of the CPG can be described by the ODEs displayed in the figure 2.

Here, $\theta_i$ is the oscillating set-point, $\phi_i$ is the phase, $r_i$ is the amplitude and $x_i$ represents the offset of the oscillation. $\omega_i$ and $\varphi_{ij}$ are coupling weights and phase biases and represent the interaction of the oscillators on each other. The results of the simulation can be seen in the following Podcast:
Further insights for the variation of the spring stiffness and the rest length can be found in Riese (2012a) and Riese (2012b).
Summary
In conclusion the main results are:
- Just one of both oscillation is needed to control a damped spring mass model in a way that the jumping heigth can be hold constant
- The influence of the rest length is higher compared to the influence of the stiffness
- To control the jumping height the frequency of the oscillation must be modulated to meet the jumping frequency
- By modulations of the phase shift the jumping performance can be tuned
References
Ijspeert, A. J. (2008). Central pattern generators for locomotion control in animals and robots: a review. Neural Networks, 21(4), 642-653.
Sproewitz, A., Moeckel, R., Maye, J., & Ijspeert, A. J. (2008). Learning to move in modular robots using central pattern generators and online optimization. The International Journal of Robotics Research, 27(3-4), 423-443.
Riese, S., & Seyfarth, A. (2012). Stance leg control: variation of leg parameters supports stable hopping. Bioinspiration & biomimetics, 7(1), 016006.
Riese, S., & Seyfarth, A. (2012, June). Robustness and efficiency of a variable-leg-spring hopper. In Biomedical Robotics and Biomechatronics (BioRob), 2012 4th IEEE RAS & EMBS International Conference on (pp. 1347-1352). IEEE.
Figure 1: Wikipedia (2007): Mass spring damper system. (2007). last access 26.06.14. http://upload.wikimedia.org/wikipedia/commons/thumb/4/45/Mass_spring_damper.svg/200px-Mass_spring_damper.svg.png
{kind=link}
Figure 2: Sproewitz (2008): Sproewitz, A., Moeckel, R., Maye, J., & Ijspeert, A. J. (2008). Learning to move in modular robots using central pattern generators and online optimization. The International Journal of Robotics Research, 27(3-4), 423-443.
Bewertung des Wiki-Moduls
| Kategorie | |
|---|---|
| Inhalt (max. 5) | 3 Pkt |
| Form (max. 5) | 4 Pkt |
| Podcast (max. 5) | 5 Pkt |
| Gesamtbewertung | 12/15 Punkte = 80% |