Inhaltsverzeichnis
ATSB2103 Fuß-Design von humanoiden Laufrobotern
| Modul-Icon | - |
|---|---|
| Veranstaltung | Aktuelle Themen der Sportbiomechanik |
| Autor(en) | Daniel Musekamp, Alexandra Schneider |
| Bearbeitungsdauer | - |
| Status | in Bearbeitung |
| Zuletzt geändert am | 26.07.2021 / 20:06h |
1. Einleitung
Der Roboter als Helfer des Menschen, der einem die schweren und unangenehmen Arbeiten abnimmt. Das ist die Darstellung in den Science-Fiction Geschichten, die uns in Büchern oder auf der Leinwand gezeigt wird. Diese Version der Roboter haben alle eines gemeinsam: Sie sind dem Menschen nachgebaut und weisen deren charakteristischen Züge auf. Die meisten humanoiden Roboter werden mit diesem Ziel konstruiert. Doch in der Realität ist die Umsetzung gar nicht so einfach.
Allein das menschliche Gehen bei zweibeinigen humanoiden Robotern nachzustellen ist sehr kompliziert. Das was der Mensch mit nur wenigen Jahren lernt und sein Leben lang behält, muss in der Robotik durch komplizierte Mechanismen und Programme erstellt werden und ist heute noch lange nicht vollständig erforscht und verstanden worden. Bis zu einem menschenähnlichen laufenden Roboter der von seiner Bewegung her auf den ersten Blick nicht von einem Kleinkind unterschieden werden kann, liegt bis jetzt noch weit in der Zukunft.
Bei der Nachahmung von menschlicher Bewegung kommt es insbesondere auf zwei Sachen an: Auf die Steuerung und das Design. In diesem Artikel wird nur auf die verschiedenen Designs von humanoiden Laufrobotern eingegangen und sich dabei auf den Fuß und das Fußgelenk beschränkt. Es wird eine kurze Analyse des menschlichen Gangs vorgestellt, sowie wichtige Mechanismen, die in der Robotik versucht werden nachzuahmen. Anschließend werden verschiedene Designs von bereits vorhandenen Roboterfüßen vorgestellt und auf noch bestehende Probleme bei der Forschung oder Umsetzung eingegangen.
2. Menschliche Füße
Der Mensch hat sich bereits viel für die eigene Technik von der Natur gelernt und abgeschaut. Auch bei der Konstruktion von laufenden Robotern wird immer wieder auf bereits bestehende Vorbilder zurückgegriffen. Da der humanoide Roboter dem Menschen gleichen soll, werden für dessen Fußdesign in erster Linie Menschen beobachtet und deren Gang analysiert. Das menschliche Gehen ist dabei ein gutes Vorbild, da es einerseits vielseitig einsetzbar und andererseits auch energieeffizient ist.
Der menschliche Fuß stellt den primären Kontakt zur Umwelt dar und ist daher ein sehr wichtiger Teil der Anatomie, die zum besseren Verständnis und Übertragbarkeit des Ganges betrachtet werden muss. Der Fuß beim Menschen besteht aus vielen kleinen Knochen, aus Gelenken, Muskeln und Sehnen, die miteinander auf komplexe Weise verbunden sind und interagieren (Narioka et al., 2012). Studien haben gezeigt, dass die Bewegung innerhalb des Fußes beim Laufen bei keinem Menschen gleich ist (Davis und Caldwell, 2010), was eine direkte Übertragung auf den Roboterfuß sehr schwer macht.
Das die Knochen, Muskeln und Sehen sich innerhalb des Fußes verschieben können ist für den menschlichen Gang allerdings essentiell, da der Fuß alleine durch seine charakteristische Struktur bereits 38% des Aufpralls vom Boden absorbiert (Kwon und Park, 2012). Würde die Kraft nicht absorbiert werden, könnten wir weder Springen noch Rennen, da wir uns durch die hohen Aufprallkräfte vom Boden den Fuß brechen würden.
Die Hauptfunktionen des menschlichen Fußes sind demnach die Schockabsorption vom Boden, um Verletzungen zu vermeiden, die Anpassung an Untergrundunebenheiten für einen sicheren und stabilen Gang und die Speicherung und Wiederfreigabe von Energie beim Fußaufsatz und -abdruck für eine höhere Effizienz (Davis und Caldwell, 2010).
Um diesen Funktionen nachzukommen, gibt es mehrere Mechanismen, welcher sich der menschliche Fuß bedient. Beim Design vom Roboterfuß versucht man diese zu duplizieren oder nachzuahmen, mit dem Ziel, dass der Roboterfuß die gleichen Funktionen wie der Menschenfuß mit dem gleichen Ergebnis erfüllen kann. Im Folgenden werden die wichtigsten und Mechanismen kurz vorgestellt und beschrieben.
2.1 Truss- und Windlass-Mechanismus

Der Truss- und der Windlass-Mechanismus werden durch die bogenförmige Knochenstruktur der Fußsohle und die Spannung in der Sehne ermöglicht. Beim Auftreten auf den Boden ist die Struktur des Fußes weich und die vertikale Kraft sorgt für ein Herabsenken des Fußbogens. Die Sehne, die von der Wade über die Ferse läuft und sich weiter über die Unterseite der Fußsohle erstreckt, bis sie sich in fünf Teile aufteilt, die in den Zehenansätzen enden, wird dabei gestreckt. Durch diese Streckung wird der Schock, der durch den Fußaufsatz entsteht, absorbiert und die Sehne speichert einen Teil dieser Energie (Truss-Mechanismus).
Sobald die Fußzehen beim Abrollen über den Fußballen gestreckt werden, wird die Sehne wieder verkürzt, was zu einer Verhärtung des Fußes führt. Dadurch wird der Fußbogen wieder angehoben und die Ferse nach oben gebracht. Die zuvor gespeicherte Energie in der Sehne wird nun wieder freigegeben und für das Abdrücken vom Boden verwendet. Dadurch, dass der Fußbogen seine Form leicht ändern kann und der Fuß am Anfang der Bewegung weich und elastisch ist, können große Kräfte absorbiert werden (Windlass-Mechanismus). Dies ermöglicht dem Menschen Sprung- und Sprintbewegungen auszuführen, ohne dass die auf den Fuß wirkende Kraft dabei zu Brüchen oder anderen Verletzungen führt.
Am Ende der Bewegung ist der Fuß hingegen sehr steif und fest, was das Abdrücken vom Boden unterstützt und zu einer optimalen Kraftübertragung führt. Wäre der Fuß weiterhin elastisch, würde sehr viel Kraft im Boden verloren gehen. So hingegen kann die in den Sehnen gespeicherte Kraft für eine flüssige Vorwärtsbewegung auf den Boden übertragen werden (Caravaggi et al., 2009).
In neuesten Forschungen wird untersucht, ob tatsächlich das Vorspannen der Zehen für die Verkürzung der Sehne und die Steifigkeit im Fuß verantwortlich ist. Es wurde die Hypothese aufgestellt, dass die Fußmuskulatur für die Versteifung des Fußes beim Abdrücken vom Boden führt. Es wird vermutet, dass die Sehne lediglich für die Schockabsorption und Energiespeicherung verantwortlich ist, während eine zeitlich abgestimmte Muskelkontraktion im Fuß zu dessen Steifung zuständig ist (Welte et al., 2018).
Die Ergebnisse aus dieser Studie konnten allerdings noch nicht eindeutig bestätigt werden. Es steht jedoch fest, dass die Sehne und der Fußbogen eine wichtige Rolle bei der energieeffizienten Fortbewegung des Menschen spielen.
2.2 "Roll-over shape" (ROS) und "zero moment point" (ZMP)

Bei verschiedenen Untersuchungen des menschlichen Ganges wurde festgestellt, dass eine fließende Bewegung sehr energiesparend ist. Dabei wurde unter anderem beobachtet, dass Fuß und Fußgelenkkomplex dabei während der gesamten Bodenkontaktphase eine „rollende“ Bewegung ausführt (Abb.2), die mit einem Rad vergleichbar ist (Torricelli et al., 2016). Diese Beobachtung wird als „Roll-over-shape“ (ROS) bezeichnet und führt zu einem gleichmäßigen vorbringen des „zero moment point“ (ZMP).

Der ZMP bezeichnet dabei den Punkt, in dem alle auf den Fuß wirkenden Kräfte durch einen Kraftvektor dargestellt werden können und dient als wichtiger Punkt für die Kontrolle der einzelnen Kräfte. Dieser Punkt verlagert sich dabei ständig während dem Laufen und sorgt nur dann für geringen Energieverlust und wenig Widerstand, wenn die Bewegung des Punktes sich lediglich in Laufrichtung verschiebt. Beim Menschen verlagert sich der ZMP dabei erst von der Ferse über den Fußboden bis zu den Fußzehen, bevor er zum anderen Fuß verlagert wird, wo das gleiche geschieht (Abb.3). Bei vielen zweibeinigen Robotern hingegen wird der ZMP nur von einem Fuß abrupt auf den anderen verlagert (Abb.3), ohne dass er lange bei den einzelnen Füßen verweilt, was den Gang instabiler macht (Kwon und Park, 2012).
In den Untersuchungen wurde dabei festgestellt das das ROS bei unterschiedlichen Bedingungen seine kreisförmige Form dabei immer beibehält, sei es bei zusätzlichem Gewicht, unterschiedlichen Höhen von Schuhabsätzen, Untergrundgefällen und verschiedenen Geschwindigkeiten. Außerdem spielt es keine Rolle, ob das festgelegte x-z-Koordinatensystem dabei nur im Fußgelenk, von Fuß- bis Kniegelenk oder von Fuß- bis Hüftgelenk gelegen ist (Hansen et al., 2003).
2.3 Fußzehen

Die Fußzehen spielen vor allem bei der Stabilität und beim Gleichgewicht eine Rolle, insbesondere bei Unebenheiten des Untergrundes (Asano et al., 2016). Die Zehen erhöhen einerseits die Bodenkontaktfläche, wodurch das Körpergewicht besser verteilt wird (Davis und Caldwell, 2010) und der Druck auf den Boden besser über die größere Fußfläche abgegeben werden kann. Der Druck auf die einzelnen Zehen ist dabei unterschiedlich groß, wobei der große Zeh die größte Last trägt (Abb.4). Das liegt daran, dass der Körperschwerpunkt zwischen den beiden Füßen liegt und der große Zeh diesem am nächsten liegt und daher beim Kontakt mit dem Boden ausgleichen muss (Kwon und Park, 2012).
Die Zehen sind zudem individuell beweglich und ansteuerbar, was auf unebenem Terrain eine große Hilfe ist. So können sich die Zehen durch ihre Gelenke beim Aufkommen auf Unebenheiten einerseits deformieren, ohne dabei Schaden zu nehmen, aber auch je nach Gegebenheit Druck auf den Boden ausüben und somit Ungleichgewicht beim Gehen ausgleichen (Seo und Yi, 2009).
Besonders wichtig sind die Zehen allerdings in der letzten Phase des Bodenkontakts. Wenn die Ferse vom Boden abgehoben ist, wurde der Großteil des Körpergewichts bereits auf den anderen Fuß verlagert, wodurch die Zehen diese Last nicht mehr tragen müssen (Davis und Caldwell, 2010). Sie sorgen aber weiterhin für Stabilität, indem sie einen zweiten Kontaktpunkt mit dem Boden herstellen. Wenn der Fuß bei dem Mittelfußknochen enden würde, wäre beim Abheben der Ferse der Kontakt zum Boden nur noch über einen Punkt hergestellt, was den Gang weniger stabil machen würde.
Zudem sind die Zehen bei der letzten Bodenkontaktphase für das Abstoßen vom Boden zuständig und transferieren damit die noch gespeicherte Energie in der Sehne in eine fließende Vorwärtsbewegung (Asano et al., 2016). Das kann man sich besonders gut am Beispiel eines Sprinters vorstellen: Beim Sprinten setzt der Athlet nicht über die Ferse auf, um seine Bodenkontaktzeit zu verringern und geringere Reibungseffekte zu erzeugen. Dementsprechend muss die gesamte Energie, die für den Sprint benötigt wird, über den Mittelfußknochen und die Zehen übertragen werden.
3. Füße von Laufrobotern
Die Entwicklung von humanoiden, zweibeinige Laufrobotern wie dem bekannten Roboter Atlas (Video rechts) ist in den letzten Jahren stetig vorangeschritten. Neue mechanische Strukturen und Antriebskonzepte wie z.B. seriell-elastische Antriebe (Pratt & Williamson, 1995) oder Motoren, die mehrere Gelenke gleichzeitig antreiben (Junius et al., 2017) haben dazu geführt, dass die Leistungsfähigkeit dieser Systeme immer mehr an das menschliche Vorbild heranreicht.
Ein wichtiger Teil des menschlichen Beins wird allerdings selbst bei der Entwicklung der neuesten Laufrobotern oft vernachlässigt: Die Füße. Bei vielen Robotern werden diese nur sehr einfach umgesetzt, oft in Form eines flachen Fußes mit elastischer Sohle. Dabei handelt es sich natürlich um eine sehr einfache Form des Designs, jedoch wird dadurch auch Potential verschenkt. So kann beispielsweise schon durch eine einfache Anpassung der Form (Abb. 5b), bei der Fußspitze- und Hacke abgerundet werden, die Laufgeschwindigkeit weiter erhöht werden und die aufzubringenden Drehmomente können reduziert werden (Yamane & Trutoiu, 2009).
In diesem Kapitel wird im Folgenden ein Überblick über die verschiedenen Designs von Füßen humanoider Laufroboter vorgestellt. Die in der Literatur zu findenden Roboterfüße können dabei grob in vier Kategorien aufgeteilt werden. Erstens wird das Einfügen von elastischem Verhalten in den Fuß vorgestellt. Zweitens gibt es Methoden, die die Elastizität des Fußes während des Laufens variieren können. Drittens werden Ansätze dargestellt, die den Gang durch das Einfügen eines zusätzlichen Zehgelenkes verbessern wollen. Viertens gibt es robotische Füße, bei denen die Struktur des menschlichen Fußes sehr detailliert nachgebildet wird. Der Umfang dieser Wiki-Seite beschränkt sich auf Füße, die speziell für humanoide, zweibeinige Laufroboter entwickelt wurden. Darüber hinaus wird in der Robotik auch auf Fußprothesen zurückgegriffen (Sharbafi et al., 2016) oder es werden Tiere wie der Gecko imitiert (Yu et al, 2018).
3.1. Nachgiebigkeit

Der einfachste Fuß für zweibeinige Roboter ist ein flacher Starrkörper aus einem einzelnen Stück, also z.B. eine simple Metallplatte (Abb. 5a). Wie in Abschnitt 2 beschrieben, hat das elastische Verhalten des Fußes jedoch eine wichtige Rolle im menschlichen Fuß. Eine Verbesserung besteht daher im Einbringen von elastischen Komponenten. Durch das Anbringen einer Schicht mit elastischem, weichem Material unter der Fußsohle (Abb. 5c) können Stöße, die beim Auftreten auf das Bein wirken, abgefedert und die Unebenheiten des Bodens ausgeglichen werden (De Magistris et al., 2017a). Solch eine elastische Sohle findet sich bei den meisten humanoiden Robotern (De Magistris et al., 2017a) wieder. Der Nachteil einer solchen Lösung ist jedoch, dass sich durch die weiche Sohle das Halten des Gleichgewicht im Bodenkontakt komplizieren kann und die Regelung erschwert wird (De Magistris et al., 2017a). Dies liegt daran, dass die weiche Sohle sich zwar an die Unebenheit des Bodens beim Auftreten anpassen, die angenommene Form in der Standphase aber nicht halten kann (Hashimoto et al., 2007). Der Kontakt zum Boden wird sozusagen wackelig. Die Optimierung der Form der weichen Sohle und die Abkehr vom flachen Design kann dem teilweise Abhilfe schaffen und gleichzeitig auch den wirkenden Stoß beim Auftreten verringern (De Magistris et al., 2017b). Eine zweite Möglichkeit zur Umsetzung des elastischen Verhaltens ist die Verwendung von mechanischen Federn im Fuß (Zhang et al., 2009). Beim Auftreten werden die Federn zusammengedrückt und nehmen so die Energie des Stoßes auf. Beim folgenden Abheben drücken sich die Federn wieder auseinander und können so zusätzlich die Bewegung unterstützen sowie Energie sparen.
3.1. Veränderbare Nachgiebigkeit
Neben der geringeren Stabilität im Stand hat eine rein elastische Lösung auch den Nachteil, dass beim Abstoßen Energie verloren wird. Statt die gesamte Energie für die Vorwärtsbewegung nutzen zu können, würde ein Teil der aufgebrachten Energie in den Elastizitäten gespeichert werden und verloren gehen. Im menschlichen Fuß dient daher der oben dargestellte Windlass-Mechanismus dazu, die Steifigkeit des Fußes beim Abstoßen zu erhöhen und so den Energieverlust zu minimieren. Beim Landen mit dem Fuß sollte der Fuß sich allerdings wieder elastischer Verhalten um die Energie des Aufstoßens speichern zu können. Die Steifigkeit des Fußes sollte also je nach Bedarf angepasst werden können.
Um robotischen Füßen eine solche Eigenschaft zu verleihen, wurden mehrere Lösungen entwickelt, die sich in ihrer technischen Umsetzung stark unterscheiden. Hashimoto et al. (2010) haben einen Mechanismus entwickelt, bei dem wie beim Windlass-Mechanismus das Anwinkeln der Zehen zu einer Erhöhung der Steifigkeit führt (Abb. 6). Die Segmente sind über passive Gelenke verbunden. Das hintere Segment umschließt dabei den Mittelteil zangenförmig, so dass der Mittelteil je nach Drehwinkel an einer anderen Stelle des hinteren Segmentes anliegt. Um den Windlass-Mechanismus zu imitieren, wird ein Kabel zwischen mittlerem Segment und dem vorderen Zehsegment gelegt. Wird das Zehsegment beim Abstoßen angewinkelt, wird über das mittlere Segment an die eine Seite der Zangenstruktur gezogen. Ist der Fuß ausgesteckt und flach, drückt das mittlere Segment an die andere Seite. Um die veränderliche Steifigkeit zu ermöglichen, ist an beiden Seiten der Zangenstruktur ein unterschiedlich elastisches Material angebracht. An der Seite, an die das Mittelsegment im Stand drückt, ist das Material dünner und härter als auf der anderen Seite. Somit ist in der Standphase eine geringere Elastizität im Spiel als beim Landen. Die veränderliche Steifigkeit konnte in Experimenten gezeigt werden, jedoch in der Standphase noch nicht wie gewünscht. Piazza et al. (2016) nutzen ebenfalls eine künstliche Sehne zur Versteifung des Fußes bei Belastung. Neben der veränderlichen Steifigkeit konnte auch eine stabilere Fortbewegung über schwieriges Terrain demonstriert werden (Video).
Anstatt den Windlass-Mechanismus nachzuahmen können auch andere, weniger bio-inspirierte Ansätze für eine veränderliche Steifigkeit gewählt werden. Qaiser et al. (2017). haben einen Fuß beschrieben, der aus einem nach oben gebeugten Bogen besteht. Dieser Bogen ist unten durch ein Modul verbunden, dessen Steifigkeit verändert werden kann. In diesem Modul befinden sich eine breitere, äußere spiralförmige Feder, die eine weitere, dünnere Feder umschließt (Bild). Beide Federn sind an der einen Seite fest verbunden. An der anderen Seite steht nur die innere Feder in Kontakt. Die Federn sind in der Mitte durch ein festes Element verbunden, dass auf den beiden Federn aufliegt. Durch verändern der Position dieses Elements kann bestimmt werden, wie viel von der äußeren Feder genutzt wird und somit die Steifigkeit variiert werden.
Zang et al. (2017) haben hingegen eine pneumatische Lösung gewählt, bei der unter der Fußsohle mehrere Airbags angebracht sind. Durch das Auf- oder Abpumpen der Luft in die Airbags kann die Elastizität des Fußes verändert werden.
{kind=link}
3.2. Zehen
Ein Teil der Forschung an bioinspirierten Füßen konzentriert sich darauf, „Zehen“ in den Fuß einzubauen. Im einfachsten Fall wird dabei, wie in Abb. 5d) dargestellt, ein zweites Segment über ein Gelenk mit dem Fuß verbunden (Kumagai & Emura, 1997).
Die Auswirkungen eines zusätzlichen Zehgelenkes wurden unter verschiedensten Gesichtspunkten untersucht. Der zusätzliche Freiheitsgrad am Fuß ermöglicht eine größere Flexibilität bei der Wahl des Laufmusters und kann für einen menschenähnlicheren Gang genutzt werden. Klassischerweise heben Roboter den ganzen Fuß auf einmal ab, wie hier im Video von Boston Dynamics' Atlas Roboter sichtbar.
Beim menschlichen Gang würden jedoch die Hacke vom hinteren Fuß zuerst angehoben werden. Würde ein Roboter mit flachem Fuß dies nachahmen, hätte nur die Fußspitze Kontakt zum Boden. Durch das zusätzliche Gelenk kann das Zehsegment abknicken und flach auf dem Boden verbleiben, wodurch sich die Kontaktfläche zum Boden vergrößert und somit die Stabilität des Gleichgewichts verbessert wird (Sellaouti et al., 2006). Die Vorteile von Zehgelenken für einen menschenähnlicheren Gang konnte auch für den Atlas-Roboter gezeigt werden (Agarwal & Popovic, 2018). Das zusätzliche Gelenk ermöglicht es zudem längere Schrittweiten zu wählen (Sellaouti et al., 2006), schneller zu gehen (Nishiwaki et al., 2002) und energieeffizienter zu laufen (Kouchaki & Sadigh, 2010).
Neben den Vorteilen, die sich beim Laufen ergeben, sind Zehgelenke auch für andere Zwecke hilfreich. Hashimoto et al. (2011) konnten eine schnelle Drehbewegung auf der Stelle durch das Anheben der Hacke vom einen und der Spitze des anderen Fuß realisieren. Auch konnte durch den Einsatz von Zehen u.a. die Reichweite des Schusses eines Fußball spielenden Roboters verbessert werden (Dorer, 2017). Neben der Stabilität beim Laufen kann z.B. auch die Balance im Stehen verbessert werden (Kouchaki & Sadigh, 2014).
Für das Design des Zehgelenks gibt es verschiedene Wahlmöglichkeiten. Die Hauptunterscheidung liegt zwischen aktiven und passiven Gelenken. Im Gegensatz zum aktiven Fall wird ein passives Gelenk nicht durch einen Motor gesteuert und hat somit auch den Vorteil, dass kein zusätzlicher Antrieb am Fuß benötigt wird. Der Nachteil verglichen mit dem aktiven Gelenk liegt in der geringeren Beeinflussbarkeit des Systems (Agarwal & Popovic, 2018). Außerdem kann durch ein aktives Zehgelenk ein zusätzliches Abstoßen realisiert werden, wodurch die Laufgeschwindigkeit weiter erhöht werden kann (Agarwal & Popovic, 2018). Durch das Anbringen einer Torsionsfeder am Zehgelenk (Kajita et al., 2007) kann bei der passiven Lösung Energie gespart werden, indem diese beim Aufsetzen des Fußes gespeichert und beim Abheben wieder freigegeben wird. Eine weitere Möglichkeit besteht in hybriden Gelenken. Bei diesen wird ein aktiv betriebenes Gelenk mit einem passiven Feder-Masse-Dämpfer-System kombiniert, wodurch die im Gelenk nötigen Drehmomente reduziert werden können (Kumar et al., 2007). Ouezdou et al. (2005) verglichen den Energieverbrauch von passiven, aktiven und hybriden Füßen und konnten zeigen, dass alle drei Modelle den Energieverbrauch im Vergleich zu einem herkömmlichen flachen Fuß reduzieren können. Der Fuß mit aktiven Zehgelenk zeigte zudem einen besseren Energieverbrauch als der passive, was mit der Möglichkeit eine effizientere Gangart zu wählen begründet wurde. Den geringsten Energieverbrauch wies die hybride Lösung auf. Bei den Studien, die Zehgelenken einen besseren Energieverbrauch bescheinigen, sollte aber beachtet werden, dass bei diesen der verwendete Roboter meist sehr klassisch zu sein scheint und die anderen Gelenken keine Nachgiebigkeit bzw. Elastizität aufweisen. Bei höheren Nachgiebigkeiten in anderen Gelenken wie z.B. dem Fußgelenk könnten die Vorteile geringer ausfallen (Honert at al., 2018).
Ein Problem beim klassischen Design des Zehgelenkes ist, dass beim Anwinkeln der Zehen das gesamte Körpergewicht auf dem Zehgelenk lastet (Yamamoto et al., 2007). Yamamoto et al. (2007) haben deshalb ein Design entworfen, bei dem nicht nur das Zehsegement, sondern auch das Ende des hinteren Segmentes (Fußballen) im Kontakt zum Boden ist. Durch den Einsatz von vier parallelen Gliedern, die Zehsegement und Fuß verbindend, kann die auf das Gelenk wirkende Kraft weiter reduziert werden. Eine weitere Verbesserung des klassischen Designs kann sein, die Nachgiebigkeit des Gelenks veränderbar zu machen. Bei dem Entwurf von Choi et al. (2016) sind dafür die Zehen und der Fuß über eine Blattfeder, also ein biegsames Metallblech, verbunden. Um die Steifigkeit der Feder anzupassen kann über einen Motor eine Walze, die auf die Feder drückt, verschoben werden. Wird die Walze nach vorne verschoben, verringert dies den Teil der Feder, der sich dabei verbiegen kann. Die variable Steifigkeit des Zehgelenks soll die Fortbewegung auf schwierigem Terrain verbessern, dies wurde allerdings nicht experimentell untersucht.
3.3. Detaillierte Nachbildungen
Eine naturgetreue Nachbildung des menschlichen Fußes zu bauen ist nicht einfach und bringt gewisse Probleme mit sich. Die größte Schwierigkeit ist es auf einem sehr kleinen Raum, sehr viele Einzelteile einzubauen und so miteinander zu verknüpfen, dass sie die korrekte Funktion ausführen. Deswegen beschränken sich viele bei der Herstellung nur auf die großen Verbindungen im Fuß und auf die wichtigsten Mechanismen.
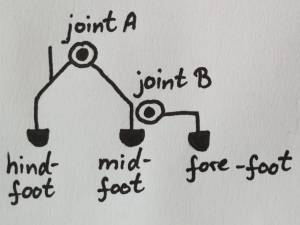
So hat die Forschungsgruppe Narioka et al. (2012) einen Roboterfuß gebaut, der aus drei festen Bauteilen (Ferse, Mittelfuß und Fußballen mit Zehen) besteht, die durch zwei Gelenke verbunden sind und einen Fußbogen, ähnlich dem des Meschen nachstellen (Abb.7). Der Fuß wird durch Pneumatik betrieben und soll sowohl die Funktion der Zehen als auch den Truss- und Windlass-Mechanismus des Fußbogens imitieren. Die Forschungsgruppe erhielten ganz gute Ergebnisse, was die Stabilität des Ganges anging.
Die Gruppe Seo und Yi (2009) hat ebenfalls versucht die Fußzehen und den Windlass-Mechanismus mit ihrem Roboterfuß nachzuahmen. Hier wurden die Fußzehen allerdings nicht als eine Einheit eingebaut, sondern als fünf individuelle Zehen. Zudem besteht der Fußbogen aus zwei Platten die eine Art Dach bilden und unten durch mehrere parallele Federn zusammengehalten werden, die die Fußsehne simulieren. Durch diese Konstruktion konnte das Nachgeben der Zehen auf unebenem Grund, sowie die Energiespeicherung beim Herabsenken des Fußbogens nachgestellt werden.
Eine eher detailliertere Nachbildung kam von der Gruppe Asano et al. (2016), die mit dem Roboter Kengoro arbeiteten. Hier wurde tatsächlich versucht die vielen Freiheitsgrade des Fußes nachzubilden, d.h. die kleinen Knochen im Fuß und deren Verbindungen nachzuahmen. Dadurch entstand eine gute Nachgiebigkeit, doch es gab Probleme das richtige Material zu finden damit die Einzelteile klein genug aber auch stabil genug waren, um das Gewicht des Roboters zu tragen. Durch die ansteuerbaren Fußzehen hat Kengoro einen sehr stabilen Stand und ist sogar in der Lage, sich auf die Fußspitzen zu stellen (Video rechts).
Ein anderer Ansatz kam von Davis und Caldwell (2010), die ebenfalls einen dreiteiligen Fuß mit herabsenkbarem Fußbogen bauten, doch ihr Fokus lag auf der Dämpfung des Fußes. Dafür haben sie ihren festen Fußkörper mit einem Material umgeben, die dem menschlichen Fuß nahe kam, um die Nachgiebigkeit und Festigkeit zu simulieren. Dieser Roboterfuß wurde allerdings nie mit ganzem Roboterkörper getestet, wodurch genaue Aussagen schwierig sind.
Der neueste Ansatz in diese Richtung kam von Russo et al. (2021). Hier wurde ebenfalls ein dreiteiliger Fuß hergestellt, der von einem dämpfenden Material umgeben wurde. Die Ferse ist über eine Feder mit dem Mittelfuß verbunden, welcher über ein Gelenk mit dem Zehenkomplex zusammenhängt. Es wurden neben dem Windlass-Mechanismus, dem Zehengelenk und der Nachgiebigkeit auch der Roll-over shape bzw. der Zero-point moment nachgebildet, da der Fuß in der Lage ist sich komplett von hinten über die Ferse bis vorne über die Fußspitzen abzurollen und dabei das Gewicht zu verlagern.
4. Fazit und Ausblick
Füße erfüllen wichtige Aufgaben in der menschlichen Fortbewegung: Die anpassbare Steifigkeit der Füße ermöglicht einerseits beim Landen den Schock zu absorbieren und Energie zu speichern, andererseits beim Abstoß die aufgebrachte Kraft durch das Versteifen des Fußes möglichst effizient in die Fortbewegung umzusetzen. Des Weiteren ermöglicht die Flexibilität des Fußes die Fortbewegung über schwierigeres Gelände. Seine Form und Zehen unterstützen effiziente Laufmuster.
Um diese biomechanischen Vorteile des Fußes auf die Laufrobotik zu übertragen, werden verschiedene Ansätze verfolgt. Im einfachsten Fall werden die Füße nachgiebig gestaltet indem sie z.B. mit elastischen Sohlen verbunden werden. Um den Verhalten der menschlichen Füße näher zu kommen, können Mechanismen verwendet werden, welche die Steifigkeit der Füße modulieren. Auch wurden Füße entwickelt, die aus mehreren Segmenten bestehen, insbesondere eines zweiten Segmentes zur Imitation der Zehen.
Bei der experimentellen Untersuchung konnte gezeigt werden, dass die vorgestellten Ansätze die klassischen, flachen Füße verbessern und ihrem menschlichen Vorbild näher kommen. So konnte u.a. die Anpassbarkeit an schwieriges Terrain (Piazza et al., 2016), höhere Energieeffizienz (Kouchaki & Sadigh, 2010) oder eine schnellere Fortbewegung (Nishiwaki et al., 2002) demonstriert werden.
Trotz dieser Ergebnisse werden auch bei neueren Laufrobotern oft noch eher einfach Füße verwendet (siehe z.B. Gim et al., 2018). Als Hindernisse werden beispielsweise eine aufwändigere Regelung (Piazza et al., 2016) und die höhere mechanische Komplexität genannt (Dorer, 2017). Auch bleibt es trotz der einzelnen positiven Ergebnisse eher unklar, welche Art Fuß allgemein am besten ist und bei der Gestaltung von Robotern verwendet werden sollten. Die einzelnen Punkte wie eine höhere Energieeffizienz und verbesserte Geländefähigkeit wurden zwar gezeigt, jedoch beschränken sich die meisten Forscher auf die Auswertung einer einzelnen Metrik. So verbleibt zum Beispiel die Frage, ob ein Fuß, dessen Adaptivität im Experiment demonstriert wurde, vielleicht auch einen höheren Energieverbrauch verursacht, dies aber nur nicht untersucht wurde. Die Vergleichbarkeit wird außerdem dadurch erschwert, dass bei der Untersuchung der Ansätze höchstens mit einem flachen Fuß verglichen wird, also der primitivsten Lösung, und nicht mit anderen in der Literatur vorgestellten Füßen. Ein drittes Problem besteht im Einfluss des restlichen Teil des Roboters: Wenn die Fußkonstruktionen anhand eines echten Laufroboters evaluiert werden, werden dabei meist sehr unterschiedliche Roboter verwendet. Wie positiv sich die entworfenen Füße auf den Gang auswirken wird sich dabei jedoch natürlich auch stets vom verwendeten System abhängen. Zum Beispiel wird ein Fuß mit zusätzlichen Federelementen einen steifen, klassischen Roboter anders beeinflussen als einen Roboter, der schon in anderen Teilen des Beins über Elastizitäten verfügt.
Eine bessere Vergleichbarkeit zwischen den Roboterfüßen herzustellen ist natürlich schwer umzusetzen und aufwändig, könnte jedoch auch dabei helfen, Entwickler von Laufrobotern von den Vorteilen fortgeschrittener Füße zu überzeugen.
5. Literaturverzeichnis
Agarwal, S. & Popovic, M. (2018). Study of toe joints to enhance locomotion of humanoid robots. In 2018 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids) (pp. 1039-1044). IEEE.
Asano, Y. et al., (2016) Human mimetic foot structure with multi-DOFs and multi-sensors for musculoskeletal humanoid Kengoro IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016, pp. 2419-2424.
Caravaggi, P., Pataky, T., John Y. Goulermas, Russel Savage, Robin Crompton. (2009). A dynamic model of the windlass mechanism of the foot: evidence for early stance phase preloading of the plantar aponeurosis. J Exp Biol 1 August 2009; 212 (15): 2491–2499.
Choi, J., Hong, S., Lee, W., Kang, S., & Kim, M. (2011). A robot joint with variable stiffness using leaf springs. IEEE Transactions on Robotics, 27(2), 229-238.
Davis, S., Caldwell, G. (2010). Te Design of an Anthropomorphic Dexterous Humanoid Foot. The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems.
De Magistris, G., Pajon, A., Miossec, S., & Kheddar, A. (2017). Optimized humanoid walking with soft soles. Robotics and Autonomous Systems, 95, 52-63.
De Magistris, G., Miossec, S., Escande, A., & Kheddar, A. (2017). Design of optimized soft soles for humanoid robots. Robotics and Autonomous Systems, 95, 129-142.
Dorer, K. (2017). Learning to use toes in a humanoid robot. In Robot World Cup (pp. 168-179). Springer, Cham.
Gim, K. G., Kim, J. & Yamane, K. (2018). Design of a serial-parallel hybrid leg for a humanoid robot. In 2018 IEEE International conference on robotics and automation (ICRA) (pp. 6076-6081). IEEE.
Hansen, A., Childress, D., Knox, E. (2003). Roll-over shapes of human locomotor systems: effects of walking speed. Clinical Biomechanics 19 (2004) 407-414.
Hashimoto, K., Sugahara, Y., Hayashi, A., Kawase, M., Sawato, T., Endo, N., Ohta, A., Tanaka, C., Lim, H. & Takanishi, A. (2007). New foot system adaptable to convex and concave surface. In Proceedings 2007 IEEE International Conference on Robotics and Automation (pp. 1869-1874). IEEE.
Hashimoto, K., Takezaki, Y., Hattori, K., Kondo, H., Takashima, T., Lim, H. O. & Takanishi, A. (2010). A study of function of foot's medial longitudinal arch using biped humanoid robot. In 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 2206-2211). IEEE.
Hashimoto, K., Yoshimura, Y., Kondo, H., Lim, H. O. & Takanishi, A. (2011). Realization of quick turn of biped humanoid robot by using slipping motion with both feet. In 2011 IEEE International Conference on Robotics and Automation (pp. 2041-2046). IEEE.
Honert, E. C., Bastas, G. & Zelik, K. E. (2018). Effect of toe joint stiffness and toe shape on walking biomechanics. Bioinspiration & biomimetics, 13(6), 066007.
Junius, K., Moltedo, M., Cherelle, P., Rodriguez-Guerrero, C., Vanderborght, B. & Lefeber, D. (2017). Biarticular elements as a contributor to energy efficiency: biomechanical review and application in bio-inspired robotics. Bioinspiration & biomimetics, 12(6), 061001.
Kajita, S., Kaneko, K., Morisawa, M., Nakaoka, S. & Hirukawa, H. (2007). ZMP-based biped running enhanced by toe springs. In Proceedings 2007 IEEE International Conference on Robotics and Automation (pp. 3963-3969). IEEE.
Kouchaki, E. & Sadigh, M. J. (2010). Effect of toe-joint Bending on biped gait performance. In 2010 IEEE International Conference on Robotics and Biomimetics (pp. 697-702). IEEE.
Kouchaki, E. & Sadigh, M. J. (2014). Effect of Toe-Joint and Heel Height on Balancing of a Standing Biped. In ASME 2014 International Mechanical Engineering Congress and Exposition. American Society of Mechanical Engineers Digital Collection.
Kumagai, M. & Emura, T. (1997). Sensor-based walking of human type biped robot that has 14 degree of freedoms. In Proceedings Fourth Annual Conference on Mechatronics and Machine Vision
Kumar, R. P., Handharu, N., Yoon, J. & Kim, G. S. (2007). Hybrid toe and heel joints for biped/humanoid robots for natural gait. In 2007 International Conference on Control, Automation and Systems (pp. 2687-2692). IEEE.
Kwon, S., Park, J. (2012). Kinesiology-Based Robot Foot Design for Human-Like Walking. International Journal of Advanced Robotic Systems.
Li, J., Huang, Q., Zhang, W., Yu, Z., Li, K. (2008). Flexible Foot Design for a Humanoid Robot. Proceedings of the IEEE International Conference on Automation and Logistics.
Minakata, H., Seki, H., Tadakuma, S. (2008). A Study of Energy-Saving Shoes for Robot Considering Lateral Plane Motion. IEEE Transactions on Industrial Electronics, Vol.55, No.3, March 2008.
Narioka, K., Homma, T., Hosoda, K. (2012). Humanlike ankle-foot complex for a biped robot. 12th IEEE-RAS International Conference on Humanoid Robots.
Nishiwaki, K., Kagami, S., Kuniyoshi, Y., Inaba, M. & Inoue, H. (2002). Toe joints that enhance bipedal and fullbody motion of humanoid robots. In Proceedings 2002 IEEE International Conference on Robotics and Automation (Vol. 3, pp. 3105-3110). IEEE.
Ouezdou, F. B., Alfayad, S. & Almasri, B. (2005). Comparison of several kinds of feet for humanoid robot. In 5th IEEE-RAS International Conference on Humanoid Robots, 2005. (pp. 123-128). IEEE.
Piazza, C., Della Santina, C., Gasparri, G. M., Catalano, M. G., Grioli, G., Garabini, M. & Bicchi, A. (2016). Toward an adaptive foot for natural walking. In 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids) (pp. 1204-1210). IEEE.
Pratt, G. A. & Williamson, M. M. (1995). Series elastic actuators. In Proceedings 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems. Human Robot Interaction and Cooperative Robots (Vol. 1, pp. 399-406). IEEE.
Qaiser, Z., Kang, L. & Johnson, S. (2017). Design of a bioinspired tunable stiffness robotic foot. Mechanism and Machine Theory, 110, 1-15.
Russo, M., Chaparro-Rico, B., Pavone, L., Pasqua, G., Cafolla, D. (2021) A Bioinspired Humanoid Foot Mechanism Applied Sciences 11, no. 4: 1686.
Seo, Jong-Tae, Yi, Byung-Ju. (2009). Modeling and Analysis of a Biomimetic Foot Mechanism. The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems.
Sharbafi, M. A., Rode, C., Kurowski, S., Scholz, D., Möckel, R., Radkhah, K., Zhao; G., Rashty, A. M., von Stryk, O. & Seyfarth, A. (2016). A new biarticular actuator design facilitates control of leg function in BioBiped3. Bioinspiration & Biomimetics, 11(4), 046003.
Sellaouti, R., Stasse, O., Kajita, S., Yokoi, K. & Kheddar, A. (2006). Faster and smoother walking of humanoid HRP-2 with passive toe joints. In 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 4909-4914). IEEE.
Torricelli, D. et al (2016). Human-like compliant locomotion: state of the art of robotic implementations. Bioinspir. Biomim. 11 051002
Welte, L., Kelly, L., Lichtwark, G., Rainbow, M. (2018). Influence of the windlass mechanism on arch-spring mechanics during dynamic foor arch deformation. The Royal Society.
Yamamoto, K., Sugihara, T. & Nakamura, Y. (2007). Toe joint mechanism using parallel four-bar linkage enabling humanlike multiple support at toe pad and toe tip. In 2007 7th IEEE-RAS International Conference on Humanoid Robots (pp. 410-415). IEEE.
Yamane, K. & Trutoiu, L. (2009). Effect of foot shape on locomotion of active biped robots. In 2009 9th IEEE-RAS International Conference on Humanoid Robots (pp. 230-236). IEEE.
Yu, Z., Shi, Y., Xie, J., Yang, S. X. & Dai, Z. (2018). Design and analysis of a bionic adhesive foot for gecko robot climbing the ceiling. International Journal of Robotics and Automation, 33(4).
Zang, X., Li, W., Liu, Y., Lin, Z., & Zhao, J. (2017). The development of pneumatic stiffness-adjustable foot for bipedal robot. In 2017 IEEE 2nd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC) (pp. 1588-1592). IEEE.
Zhang, P., Zhou, C., Zhang, L., Tian, Y., & Liu, Z. (2009). Adaptive compliant control of humanoid biped foot with elastic energy storage. In 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (pp. 928-933). IEEE.
Bildnachweise
| Abbildung | Rechte | Verwendet von |
|---|---|---|
| 1 | A | Alexandra Schneider |
| 2 | A | Alexandra Schneider |
| 3 | A | Alexandra Schneider |
| 4 | A | Alexandra Schneider |
| 5 | A | Daniel Musekamp |
| 6 | A | Daniel Musekamp |
| 7 | A | Alexandra Schneider |
Bildnachweise ergänzt am:
A = Eigenes Bild B = Freie Nutzung C = Recht das Bild im Wiki öffentlich benutzen zu dürfen