Inhaltsverzeichnis
Hopper
| Thema | Hopping & Hopper |
|---|---|
| Veranstaltung | ADP Laufrobotik |
| Semester | WS 2012/13 |
| Namen | Burbach, J.-N.; Erler, P.; Hoitz, F.; Stuhlenmiller, F.; Xiaoguang, Z.; Zimmermann, C.; Zwetsch, F. |
| Bearbeitungsdauer | 30 min |
Hopping
Hopping oder Hüpfen bezeichnet Sprünge, die aus dem Sprunggelenk kommen. Die hauptsächlich hierbei interagierenden Muskeln sind der M. soleus (SOL) und der M. gastrocnemius (GAS). Diese beiden Muskeln gehören zu den Plantarflexoren (siehe Abbildung 1).
<imgcaption image1 |Unterschenkel Muskulatur (http://www.dailykos.com/story/2010/06/07/873616/-WHEE-Your-Gastrocnemius-and-Soleus-Muscles)>
 </imgcaption>
Bereits vor dem Bodenkontakt wird der Muskel vorinnerviert, damit beim Landen kein Schaden entsteht und oder der nächste Absprung schneller und kräftiger erfolgt. Beim Landen wird das Gelenk gebeugt und der SOL und GAS gestreckt, dadurch entsteht eine Vorspannung. Mithilfe der Vorspannung wird Energie zwischengespeichert die daraufhin bei einem weiteren Hüpfer genutzt wird. Hier wird das Gelenk wieder gestreckt und SOL und GAS verkürzt.
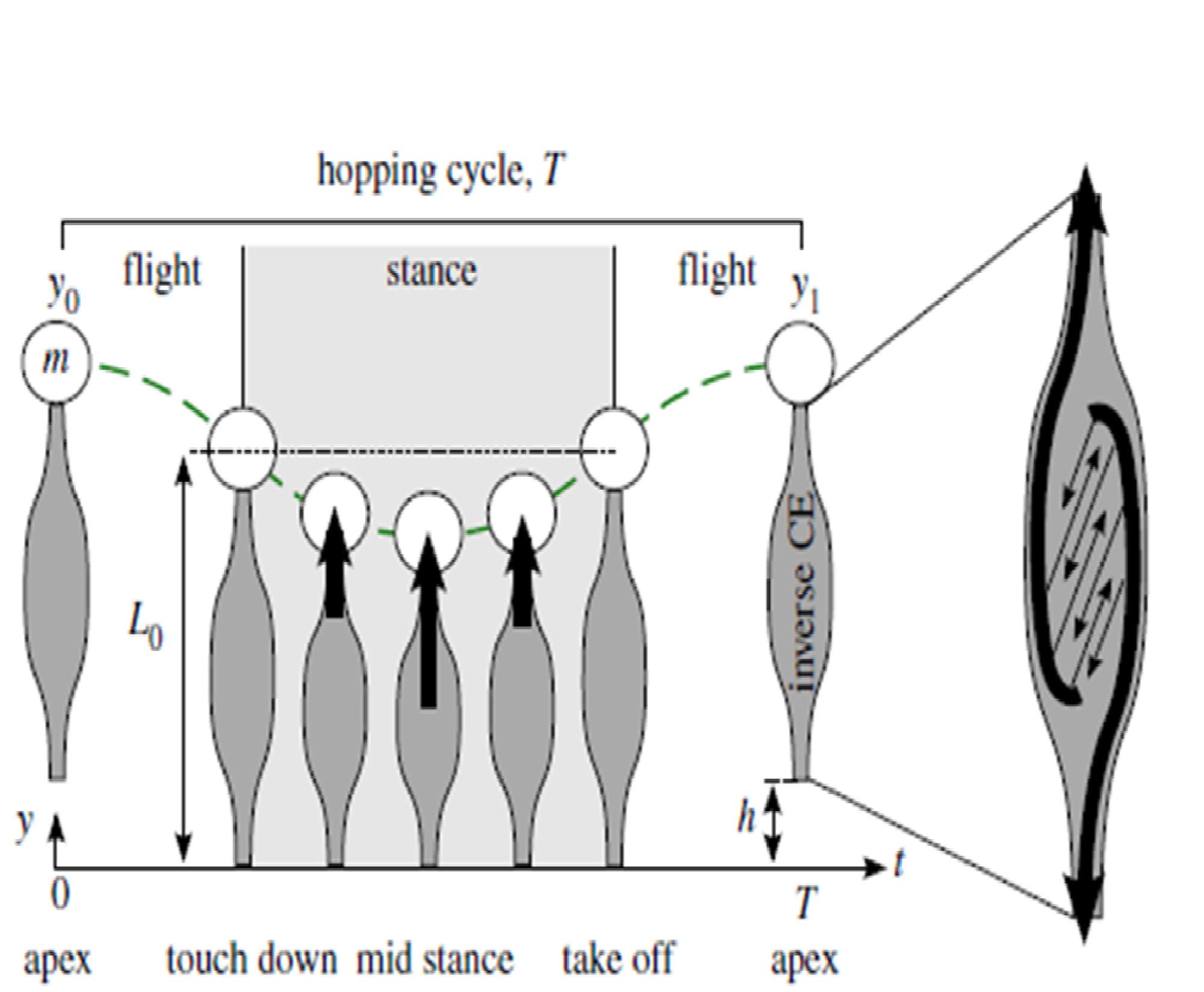
Das Hüpfen besteht aus mehreren Phasen, die bei mehrmaligem Hüpfen einen Zyklus ergeben. Der Zyklus nach D. F. B. Haeufle und Seyfarth (2012) besteht aus Flugphase, Landen, Stand und Absprung, was er in der Abbildung 2 verdeutlicht.
<imgcaption image2 |Hopping Model (Häufle, 2012, S. 2)>
</imgcaption>
Bereits vor dem Bodenkontakt wird der Muskel vorinnerviert, damit beim Landen kein Schaden entsteht und oder der nächste Absprung schneller und kräftiger erfolgt. Beim Landen wird das Gelenk gebeugt und der SOL und GAS gestreckt, dadurch entsteht eine Vorspannung. Mithilfe der Vorspannung wird Energie zwischengespeichert die daraufhin bei einem weiteren Hüpfer genutzt wird. Hier wird das Gelenk wieder gestreckt und SOL und GAS verkürzt.
Das Hüpfen besteht aus mehreren Phasen, die bei mehrmaligem Hüpfen einen Zyklus ergeben. Der Zyklus nach D. F. B. Haeufle und Seyfarth (2012) besteht aus Flugphase, Landen, Stand und Absprung, was er in der Abbildung 2 verdeutlicht.
<imgcaption image2 |Hopping Model (Häufle, 2012, S. 2)>
 </imgcaption>
In diesem Modell ist eine Masse über einem Beinstreckermuskel angeordnet. Das inverse kontraktile Element arbeitet in die positive y Richtung. Der Körper wird beim Aufkommen gestaucht und wenn die inverse kontraktile Einheit beginnt zu arbeiten wird er wieder gestreckt und beginnt vom Boden abzuheben.
</imgcaption>
In diesem Modell ist eine Masse über einem Beinstreckermuskel angeordnet. Das inverse kontraktile Element arbeitet in die positive y Richtung. Der Körper wird beim Aufkommen gestaucht und wenn die inverse kontraktile Einheit beginnt zu arbeiten wird er wieder gestreckt und beginnt vom Boden abzuheben.
Marco Hopper
Die Konstruktion und das Design von zweibeinigen Robotern sind durch gewisse Eigenschaften von Motoren, wie beispielsweise dem Drehmoment oder der Drehzahl, oder der durch das Material verursachten Reibung eingeschränkt.
Um die Effizienz und die Stabilität des Gangbildes (z.B. Laufen, Rennen, Springen) zu verbessern, werden daher häufig federähnliche Strukturen in Laufrobotern eingebaut. Dabei wird davon ausgegangen, dass hauptsächlich die Sehnen des biologischen Muskel-Sehnen-Gelenk System die Ursache für das elastische Verhalten von Beinen sind.
Neuste Erkenntnisse zeigen allerdings, dass simulierte reflexgesteuerte Muskeln sich federähnlich verhalten können obwohl die Sehnen komplett steif ist. Daher benötigt ein quasi-elastisches Verhalten der Gliedmaßen nicht notwendigerweise passive-elastisch nachgebende Strukturen innerhalb des Körpers.
Seyfarth, Kalveram und Geyer [Seyfarth u. a. (2007)] stellten in ihrem Paper den Marco-Hopper-Robot vor, um der Frage nachzugehen ob aus reiner Muskel-Reflex-Aktivität ein Muster entstehen kann, dass dem Hüpfmuster eines einbeinigen Sprunges mit Kontakt und Flugphase ähnelt.
Marco besteht aus einem Körper und einem motorgesteuerten Bein, welches in vertikaler Richtung bewegt werden kann.
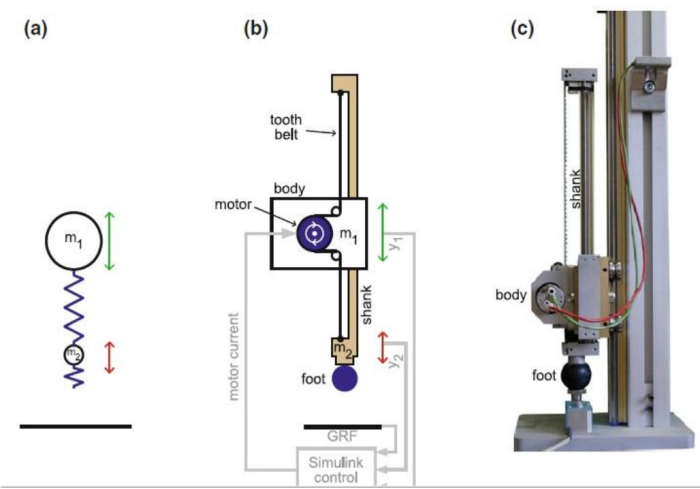
Abbildung 3 zeigt die technische Umsetzung des Marco-Hoppers. Ein Schlitten, der den Körper repräsentiert, gleitet über Kugellager auf einer vertikalen Rampe auf und ab. Ein starres Beinsegment ist am Schlitten befestigt und kann sich relativ dazu nach oben und unten bewegen. Auf dem Schlitten ist ein Motor angebracht. Er bewegt das Beinsegment über ein an der Motorwelle angebrachtes Zahnrad, welches wiederum einen Zahnriemen dreht, der an der Stange befestigt ist.
Wenn der Fuß des Beinsegments Bodenkontakt hat (Standphase), kann der Schlitte über einen entsprechenden Impuls/Strom nach oben beschleunigt werden.
Ohne Bodenkontakt (Flugphase), folgt der Körperschwerpunkt von Schlitten und Beinsegment den Gesetzen des freien Falls. Am unteren Ende des Beinsegments ist ein Ball aus Adiprene, ein stark dämpfendes Material, befestigt. Dieser Dämpfer mildert den Aufprall auf der Bodenplatte, der diese beschädigen könnte.
Die Trägheit des Schlittens wird durch die Trägheit des Motors auf 1.9 kg erhöht. Darüber hinaus wirkt eine Reibungskraft um 6 N.
Das bedeutet, dass der Motor das Beinsegment bezüglich des Schlittens zu einer sehr trägen und steifen Vorrichtung macht. Dies zeigt die Tatsache, dass das Beinsegment, durch die Gravitation auf den Boden gezogen, dort haften bleibt, wenn sich der Motor nach oben bewegt.
Drei Sensoren erfassen den Status des Marco:
Ein Posimag System misst die vertikale Position des Schlittens, ein Beschleunigungssensor die entsprechende Beschleunigung und ein Dehnungsmessstreifen auf der Bodenplatte die Kontaktkraft. Die Länge des Beinsegments wird via numerischer Integration berechnet.
Studien mit dem Hopper sollten zeigen, wie stabiles Hüpfen in einem Roboterbein generiert werden kann: Es fordert, dass die verlorene Energie ersetzt wird. Dies kann auf mehrere Arten geschehen. Das gemeinsame Merkmal der getesteten Modelle war, dass die Energieversorgung nach der mittleren Standphase größer war als die davor [Seyfarth u. a. (2007)].
<imgcaption image3 |Marco Hopper>
 </imgcaption>
<imgcaption image4 |Der Marco Hopper [mod. nach Kalveram u. a. 2012]>
</imgcaption>
<imgcaption image4 |Der Marco Hopper [mod. nach Kalveram u. a. 2012]>
 </imgcaption>
</imgcaption>
Quellen
Siehe Literaturverzeichnis
Sprungvideo zum MARCO-Hopper Modell
Weiter zu der Simulation indexmenu_n_1