Inhaltsverzeichnis
Hopping
| Thema | Simulation eines biologischen Muskels und die Entwicklung eines mechanischen Konzepts |
|---|---|
| Veranstaltung | ADP Laufrobotik |
| Semester | WS 2012/13 |
| Namen | J.-N. Burbach, P. Erler, F. Hoitz, F. Stuhlenmiller, Z. Xiaoguang, C. Zimmermann, F. Zwetsch |
| Bearbeitungsdauer | 30 min |
| Author/Verantwortlich | Christina Zimmermann |
Einleitung
Innerhab einer interdisziplinären Studienarbeit zwischen den Fachgebieten FB16 Maschinenbau, Institut für Mechatronische Systeme und FB03 Humanwissenschaft, Institut für Sportwissenschaft mit dem Thema Laufrobotik hat sich für uns folgende Motivation herauskristallisiert.
Betreut wurde diese Studienarbeit von Prof. Dr. phil. Seyfarth und Dipl.-Ing Beckerle.
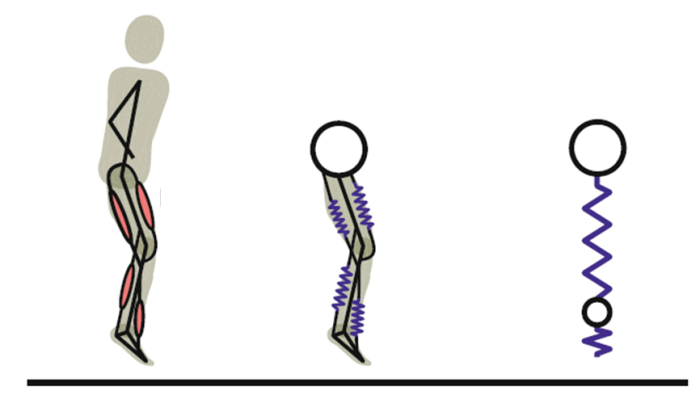
<imgcaption image1 |Mechanisches Muskelmodell [mod. nach Kalveram u. a. 2012]>
 </imgcaption>
</imgcaption>
Motivation
Die Biologie zeigt, dass Tiere und Menschen ein effizientes Zusammenspiel von Muskelgruppen besitzen. Insbesondere die Tiere, zum Beispiel Pferde und Kängurus, haben einen sehr effizienten Bewegungsablauf. Ein Höchstmaß an Energiespeicherung, während der Bewegung, bewirkt die Aneinanderreihung und Parallelschaltung von kurzfaserigen Muskeln, langen Sehnen und Bändern. Sehnen geben die gespeicherte Energie fast verlustfrei ab, wenn die Spannung innerhalb der Bewegung wieder nachlässt. Sie fungieren als elastische Federn und können als „Springstock-Modell“ die aktive Muskelarbeit erheblich reduzieren. [Ziermann (2006)]
Der biologische Bewegungsapparat bzw. das Muskel-Modell soll auf die Mechanik übertragen werden, um davon in verschiedenen Bereichen, wie der Prothetik und der Robotik, profitieren zu können. Dabei ist es wichtig, den Bewegungsablauf des Menschen oder der Tiere zu analysieren und diesen als Modell darzustellen. Vereinfacht besteht das System Mensch aus Knochen, Gelenken, Bändern und Muskeln (siehe Muskel). Die Knochen stabilisieren den Körper und geben ihm seine Statur. Flexibel ist der Körper durch Gelenke und Bänder, die miteinander verbunden sind. Das Knochengrüst wird durch die Muskeln bewegt. Die Muskeln ziehen sich dabei auf Befehl zusammen und entspannen sich dann wieder. Es existieren viele verschiedene komplexe Muskelmodelle. Für eine Bewegungssimulation hat sich das drei Komponentenmodell nach Hill durchgesetzt [D. F. B. Haeufle und Schmitt (2012)].
Menschen und Tiere bewegen sich in unterschiedliche Bewegungsformen, wie schwimmen, laufen, rennen, springen, etc. Kängurus haben eine sehr gute Energiebilanz bei der Bewegungsform Springen. Allgemein betrachtet, müssen zum Springen alle Beine gleichzeitig den Körper vom Boden abdrücken. Sprunghöhe und -weite ergeben sich aus der Kraft der Beine und der Länge der Kraftwirkung, der sogenannten Federstrecke. Bei den Kängurus ist zur Vergrößerung der Federstrecke der Fuß länger geworden und bei schneller Fortbewegung berühren nur die Spitzen der Zehen den Boden, wie es z.B. bei Huftieren auch der Fall ist [Thiele (2010)]. Über eine Bewegungssimulation, unter Anwendung des Muskelmodells nach Hill und Häufle, soll der Sprungvorgang simuliert und anschließend auf ein mechanisches Antriebskonzept übertragen werden.
Aufgabenstellung
Springen und Hüpfen ist eine wichtige Bewegungsform des Menschen. Der Sprungvorgang soll daher Anwendung in der Prothetik und der Robotik finden. Um diesen Vorgang mechanisch umsetzen und optimieren zu können, wird der biologische Muskel anhand des Muskel Modells nach Hill und Häufle beim Springen simuliert.
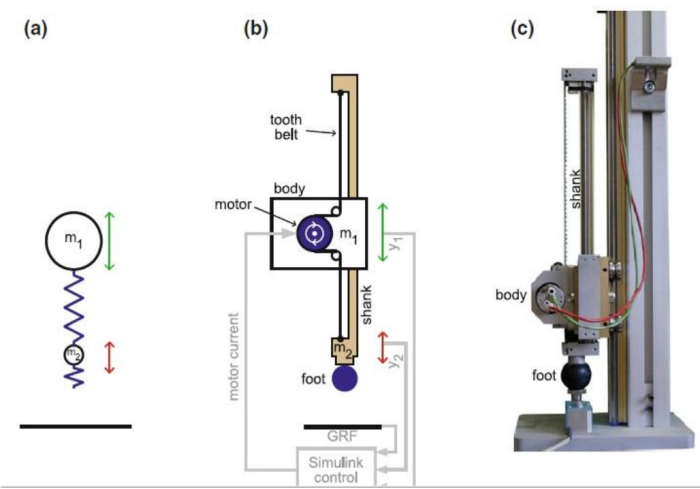
Das Springen gehört zu den elementaren Bewegungen im Sport und Alltag. Simuliert wird ein Muskel mit zwei Massen, der Körper- und der Fußmasse, während des Sprungvorganges. Der Muskel repräsentiert den Beinmuskel, der durch sein Kontraktion die Körper- und die Fußmasse nach oben befördert. Für eine kurze Zeit hat die Masse $m_1$, die Fußmasse, keinen Bodenkontakt mehr[D. F. B. Haeufle und Seyfarth (2012)]. Die Masse $m_2$, die Körpermasse, befindet sich, wie beim Menschen, über der Fußmasse. Als Grundlage hierfür dient das in Abbildung 2 dargestellte Marco-Hopper-Modell.
In der Simulation wird das Muskelmodell nach Hill und Häufle [Haeufle u. a. (2012)] in das Marco-Hopper-Modell implementiert, dabei muss der spezifische Aufbau des Hoppers angepasst werden. Die Simulation wird mit Matlab/Simulink ausgeführt. Darüber hinaus soll mithilfe der Simulation des Muskelmodells ein reales Antriebskonzept über eine geeignete Kinematik, die die geforderten Funktionen erfüllt, erarbeitet und konzipiert werden. Die geometrischen Abmessungen des Hopper-Modells stellen dabei eine Annäherung dar und sollen hauptsächlich als Vorlage dienen. Zu dem erarbeiteten realen Antriebskonzept soll ein vereinfachtes CAD-Modell erstellt werden. Dieses wird mit NX Unigraphics 8.5 modelliert.
<imgcaption image2 |Der Marco Hopper [mod. nach Kalveram u. a. 2012]>
 </imgcaption>
</imgcaption>
Hauptziele
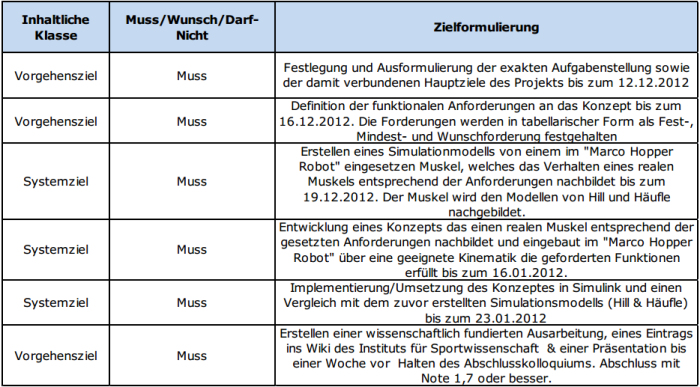
Mithilfe der Simulation des Sprungvorganges auf der Basis des Muskel Modells nach Hill und Häufle kann das biologische System mit dem mechanischen Muskelmodell verglichen werden. Dabei soll eine Modellbetrachtung und ein Energievergleich des simulierten und des mechanischen Systems durchgeführt werden. Langfristig soll das mechanische Konzept eine mechatronische Nachbildung des menschlichen Muskels ermöglichen. Spätere Anwendungen befinden sich beispielsweise in der Prothetik. In der Abbildung 3 sind die Hauptziele des Projektes aufgelistet.
<imgcaption image3 | Hauptziele>
 </imgcaption>
</imgcaption>
Zeitplan
Kick-off des Projektes „Laufrobotik - Simulation von biologischen Muskeln und Umsetzung in ein technisches Antriebskonzeptes“ ist Anfang November 2012 in einer Gruppe von Interessenten gewesen. In den ersten Wochen wird notwendiges biologisches Fachwissen vermittelt, um einen guten Einblick in das Thema der Laufrobotik zu bekommen und um damit eine Aufgabenstellung im Team heraus arbeiten zu können. Ende November gab es daher die Aufgabe zwei Projektteams zu bilden, um dann mit der jeweiligen Gruppe (aus 6 und 7 Mitgliedern) die selbstgestellte Aufgabestellung zu bearbeiten. Nach der notwendigen Vorarbeit der Zielfdefinition und der damit verbundenen Aufgabenteilung wird ein Zeitplan erstellt. Dieser Zeitplan (Abbildung 4) umfasst das gesamte Projekt, auch mit der Fertigstellung der Dokumentation. Unterteilt wird er in Meilensteine und mehreren Zwischenzielen, um einen besseren Überblick über den Projektstatus jederzeit ermöglichen zu können. Einige Aufgaben können dabei parallel bearbeitet werden, andere erfordern ein sequentielles Arbeiten.
<imgcaption image4 | Zeitplan>
 </imgcaption>
</imgcaption>
Aufgabenteilung
Unsere Projektgruppe setzt sich aus sieben Mitgliedern zusammen, zwei Sportwissenschaftlern und fünf MaschienenbauerInnen. Um ein zielgerichtetes Arbeiten im Team zu ermöglichen müssen Teilaufgaben zugeteilt werden. Entsprechende Teilaufgaben wurden in drei Teilbereiche zusammengefasst. Die Aufgaben unterteilen sich in das biologische Fachwissen von Muskelaufbau und -funktion, in die Simulation und in die Entwicklung eines mechanischen Konzeptes. Simulation und Konzeptbildung basieren auf dem Muskelmodell von Hill und Häufle. Entsprechend dieser Aufgabenteilung wurden die Gruppenmitglieder je nach Fähigkeiten zu geordnet. Der Aufgabenbereich Simulation befasst sich mit der Simulation des Sprungvorganges eines Muskelmodells nach Hill und Häufle basierend auf dem Modell des Marco-Hopper. Zu diesem Bereich gehört auch das Aufstellen der Bewegungsgleichungen und die Berechnung der Kinematik. Ein anderer Bereich ist die Konzeptionierung und Auslegung eines mechanischen Antriebskonzeptes, welches, wie in der Simulation, als Grundlage den Marco-Hopper hat. Der mechanischen Antrieb des Marco-Hopper-Modells soll durch ein mechanisches Antriebskonzept basierend auf den Muskelmodell nach Hill und Häufle ersetzt werden. Dazu soll ein mechanisches Konzept und ein Entwurf in CAD mit NX Unigraphics erstellt werden. Des Weiteren müssen die einzelnen Komponeten des Hill und Häufle Modells mit mechanischen Komponenten ersetzt werden. Die Auslegung der Komponenten Motor, Dämpfer, Feder und Energiewandler befindet sich auch in diesem Aufgabenbereich. Biologisches Fachwissen und dessen Vermittlung stellt einen weiteren wichtigen Bereich dar. Dies beinhaltet auch eine Literaturrecherche von wichtigen biologischen Parameter und die Validierung der Simulationsergebnisse. Die Teilaufgabe umfasst auch eine Aufbereitung der erarbeiteten Ergebnisse dieses Projektes im Wikipedia des Instituts für Sportwissenschaft. Darin sollen die Ergebnisse strukturiert zusammengefasst und für jederman verständlich dargestellt werden.