Inhaltsverzeichnis
Laufen & Gehen
| Thema | Gangsimulationen für das Laufen u. Gehen |
|---|---|
| Veranstaltung | ADP Laufrobotik |
| Semester | WS 2012/13 |
| Namen | S. Ebner, J. Sinz, Z. Gong, T. Kaminsky, L. L. Tremper, F. Cengic |
Das Advanced-Design-Project mit dem Titel ADP Laufrobotik wurde im Wintersemester 2012/13 an der TU Darmstadt als fachbereichsübergreifendes Projekt angeboten. Das Projekt wurde für Studierende des Instituts für Sportwissenschaft aus dem Fachbereich Humanwissenschaften und des Fachbereichs Maschinenbaus angeboten.
Die Verantwortlichen Dozenten waren Prof. A. Seyfarth aus dem Bereich Sportwissenschaft und Dipl.-Ing. P. Beckerle aus dem Fachbereich Maschinenbau.
Hintergrund des ADP Laufrobotik war es, Kenntnisse aus dem Maschinenbau und aus der Sportwissenschaft zusammenzuführen und in die Bearbeitung von diversen Problemstellungen aus dem Bereich Bewegungssimulation, bzw. Muskel- & Bewegungsmodellierung zu integrieren. Hierzu wurden in den ersten Veranstaltungen zunächst Grundlagen aus beiden Fachbereichen dargestellt und der Stand der Technik der Muskel- und Bewegungsmodelle aufgezeigt.
Zunächst wurde der Muskel-Sehnen-Komplex in seine Eigenschaften unterteilt und den jeweiligen Pendants im Maschinenbau zugeordnet. Der Muskel wurde hierbei durch eine Kombination aus Getriebe und Antrieb beschrieben. Der Sehnenanteil entsprach einem seriell-elastischen Element (z.B. Feder). Im Hinblick auf die konzeptionelle Entwicklung und Implementierung eines Muskels wurde dabei das Häufle-Modell ins Zentrum der Diskussion gestellt.
In den folgenden Sitzungen wurden einige Themengebiete, wie das Springen, Laufen, Rennen, etc., differenzierter und eingehender beleuchtet. Parallel zu den regelmäßig stattfindenden Treffen wurden die studentischen Teilnehmer des Projekts in zwei Gruppen zu je sechs Studenten aufgeteilt. Da die Problemstellung zu Beginn noch offen war, sollten die Studenten sich zunächst in die Materie einarbeiten. Aufbauend auf die Auseinandersetzung mit dem Thema sollte die Definition des Arbeitsauftrages und der Vertiefungsrichtung innerhalb der Gruppen geschehen.
Unsere Gruppe begann sich ab Woche 3 zu treffen. Bei diesen Treffen wurden die Themen aus der letzten gemeinsamen Sitzung angesprochen und diskutiert. Nachdem von den Dozenten der Auftrag erteilt wurde, die zu bearbeitende Problemstellung, auf Basis der Vorträge, zu konkretisieren, erstellten wir einige Ideen, welche Probleme aus der Grundlagenvorstellung aufgriffen. In den nächsten 3 Wochen wurden diese Vorschläge dann nach und nach mit den beiden Dozenten weiter konkretisiert und es konnte eine Zielsetzung unserer Bearbeitung formuliert werden.
Die grundlegende Aufgabe beider Gruppen war es, ein Simulationsmodell zu entwickeln und zu implementieren, das zur Analyse von verschiedenen Bewegungsarten (Gehen, Laufen, Springen etc.) geeignet ist. Die Grundlage der Implementierung sollten dabei die vorgestellten, in der Literatur beschriebenen Modelle sein, auf die aufbauend eigene Ideen eingebunden werden konnten.
Motivationsgründe
Die Studierenden beider Fachrichtungen standen vor der Aufgabe die sportwissenschaftlichen Erkenntnisse des Muskelorgans in ein mechanisches Antriebskonzept zu übertragen. Als Entwicklungsumgebung wurde übersichtlichkeitshalber die Simulink-Toolbox aus Matlab verwendet. In internen Meetings kristallisierte sich als Aufgabenstellung die Simulation von drei Gangarten des Menschen heraus.
Unsere Gruppe war heterogen gestrickt und die Mitglieder brachten verschiedene Vorkenntnisse mit. Die Hauptmotivation für das Projekt bestand in der praktischen Umsetzung und der Aneignung von Wissen. Die im Studium gelehrten Erkenntnisse der Mechanik, sowie der Sportwissenschaft wurden miteinander verknüpft und durch die Programmierung weiter vertieft.
Stand der Technik
Für die drei Laufmodelle wurde der Komplexitätsgrad gering gehalten und somit nur die
wichtigsten mechanischen Grundprinzipien (z.B. Systemenergien) in die Simulation mit
einkalkuliert. Dittrich (2005, S. 5) differenziert in ihrer Diplomarbeit zwischen einfachen und
komplexen Modellen. Wohingegen komplexe Modelle den menschlichen
Fortbewegungsmechanismus detaillierter aufzeigen, bietet die einfache Variante einen
Überblick aller Lösungen. Somit wird auch weniger Rechenleistung benötigt, zumal weniger
Variablen definiert sind.
Unser Feder-Masse-Läufer zählt mit seiner überschaubaren Anzahl an Parametern zu den
einfachen Modellen. Aus der Forschungsperspektive ist in diesem Bereich ein positiver
Entwicklungstrend zu verzeichnen. Die Wurzeln der Neuzeit ragen bis in das Jahr 1964
hinein, wo erste Experimente durchgeführt wurden, dessen Erkenntnisse dem Feder-Masse-
Modell stark ähneln. In den Publikationen von Blickhan (1989) und McMahon und Cheng
(1990) wurde das Feder-Masse-Modell erstmals beschrieben.
Dieses besteht im Wesentlichen aus einer Masse (entspricht dem Körperschwerpunkt), die sich
im Stand um den Fußpunkt der Feder dreht (vgl. Dittrich, 2005, S. 6). Die Flugphase tritt ein,
wenn die Feder ihre Ruhelänge eingenommen hat, da in der Luft keine Bodenreaktionskräfte
wirken können. Dieses einfache Modell hat sich bis heute bewährt und bildet in der Regel die
Grundlage für zahlreiche biomechanische Untersuchungen.
Zielsetzungen
Nachdem die ersten Präsentationsblöcke seitens der Projektleiter gehalten wurden, kristallisierten sich das geplante Vorgehen und die Ziele sukzessiv heraus und sollen hier kurz erläutert werden. Die primären Ziele spalten sich in einen Entwicklungsteil und einen Auswertungsteil auf. Als Sekundärziel wurde eine graphische Ausgabe der Simulationsergebnisse gewünscht.
Primärziele
Wie bereits erwähnt, spalten sich die primären Ziele diese Projekt in die Entwicklung von Laufmodellen, sowie deren Auswertung auf. Die jeweils geplanten Vorgehensweisen sind im Folgenden beschrieben.
Entwicklung von Laufmodellen
Der erste Schritt sieht die Entwicklung von Modellen vor, mit denen verschiedene Fortbewegungsmethoden simuliert werden können. Im speziellen sollen die Fälle des Gehens und Rennens näher betrachtet werden, wobei sich die Betrachtungen zunächst auf ein Bein beschränken sollen. Bei erfolgreicher Implementierung der Modelle für jeweils ein Bein, soll versucht werden, diese Modelle auf zwei Beine zu erweitern. Dies ist vor allem für die Implementierung des Modells für den Fall des zweibeinigen Gehens wichtig, da sich dort, im Gegensatz zum Rennen, nicht jeweils nur ein Bein in der Standphase befindet, sondern zwei Beine gleichzeitig den Boden berühren können. Die primären Ziele beziehen sich also auf:
- Implementierung von Ein-Bein-Modellen für die Fälle Gehen und Rennen
- Erweiterung des Ein-Bein-Modells Gehen auf ein Zwei-Bein-Modell
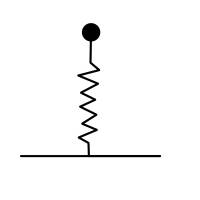
Um die Implementierung dieser Modelle durchführen zu können, sollen zunächst geeignete Ersatzmodelle erarbeitet werden, die aus verschiedenen Kombinationen der Komponenten Feder, Dämpfer und Aktuator bestehen sollen. Auch hier ergaben sich aus der Diskussion mit den Betreuern folgende Vorgehensziele. Das erste Ersatzmodell, das betrachtet werden soll ist der einfache Feder-Masse-Läufer, wie er in Abb. 1 dargestellt ist.
<imgcaption image1|Einfacher Feder-Masse-Läufer>
 </imgcaption>
</imgcaption>
Hierzu soll zunächst mit Hilfe der Literatur ein Simulink-Modell erstellt werden, das später sukzessive erweitert wird. Die Erweiterungen, die anhand dieses Grundmodells implementiert werden sollen, sind in Abb. 2 dargestellt.
<imgcaption image2|Erweiterungen des Masse-Feder-Modells>
 </imgcaption>
</imgcaption>
Die erste Erweiterung sieht zwei, zur Feder parallelgeschaltete Komponenten vor. Diese sind ein Dämpfer und ein Aktuator, siehe Abbildung 2 links. In einem zweiten Erweiterungsschritt soll nun dieser Komplex aus Feder, Dämpfer und Aktuator um eine zusätzliche serielle Feder erweitert werden. Dieses Ersatzmodell ist in der Mitte von Abbildung 2 dargestellt. Die in den primären Zielen genannten Modelle sollen also jeweils mit folgenden Ersatzmodellen realisiert werden:
- Einfaches Feder-Masse-Ersatzmodell
- Ersatzmodell aus Feder-Dämpfer-Aktuator-Komplex (FDA-Komplex)
- Ersatzmodell aus FDA-Komplex mit zusätzlicher serieller Feder
Die rechte Erweiterung des Modells in Abb. 2 zeigt das Gehen-Modell in der Zwei-Kontakt-Phase.
Auswertung der Modelle
Der zweite Schritt sieht vor, die erstellten Simulationsmodelle auszuwerten. Die Auswertung beginnt dabei mit der Findung geeigneter Parametersätze, mit denen die entwickelten Modelle stabil laufen können. Hierfür soll mit Hilfe der Literatur ein Programm entwickelt werden, das verschiedene Kombinationen von Parametern testet und bezüglich der maximal erreichbaren Schrittzahl auswertet. Sobald diese Parameter gefunden sind, soll die Realitätsnähe dieser Modelle erforscht und eine Analyse durchgeführt werden, mit der die Bedeutung der einzelnen Komponenten für die Güte der Modelle ermittelt werden soll. Für die Ermittlung der Realitätsnähe werden Vergleiche mit realen Werten gezogen , wie beispielsweise ein Vergleich der simulierten Schrittlänge und Frequenz der Modelle mit den Werten eines leistungsstarken Marathonläufers. Bei der Analyse der Bedeutung der einzelnen Komponenten für die Güte der Modelle, sollen systematisch einzelne Komponenten (Dämpfer, Feder, Aktuator) der Modelle ausgeschaltet werden. Die Ergebnisse der Simulation der einzelnen Modelle werden dann untereinander verglichen, um eine Aussage über die Notwendigkeit bestimmter Komponenten treffen zu können.
Sekundärziel
Als sekundäres Ziel sollen die ermittelten Ergebnisse durch eine Animation graphisch dargestellt werden, damit ein besseres Verständnis der berechneten Graphen erreicht wird. Hierbei soll ein Programm erstellt werden, das die Ergebnisse aus den jeweiligen Simulink-Simulationen ausliest und in einer 2D-Animation derart darstellt, dass die einzelnen Phasen der Laufzyklen ersichtlich werden.