Inhaltsverzeichnis
Muskelmodell
| Thema | Muskelmodell nach Hill & Häufle |
|---|---|
| Veranstaltung | ADP Laufrobotik |
| Semester | WS 2012/13 |
| Namen | Burbach, J.-N.; Erler, P.; Hoitz, F.; Stuhlenmiller, F.; Xiaoguang, Z.; Zimmermann, C.; Zwetsch, F. |
| Bearbeitungsdauer | 15 min |
Einleitung / Voraussetzungen
Diese Simulation wurde nach einem biologischen Muskel konzepiert. Zum biologischen Muskel wurden in diesem Projekt zwei mechanische Konzepte verwendet zum einen das Modell nach Hill und das Modell nach Häufle.
Muskelmodell nach Häufle
Im Muskel Modell nach Häufle [Haeufle u. a. (2012)] geht es um eine Erweiterung des Hill-Models. Häufle erweitert das kontraktile Element um die makroskopisch mechanische Struktur und Funktion des biologischen Muskel in Hinsicht auf seine dynamische Rolle während der Kontraktion zu verstehen. Das Hill-Modell (siehe Abbildung 1) besteht, wie zuvor erwähnt aus einer Feder und einem kontraktilem Element, welche eine weitere Feder seriell geschaltete haben. Häufle hat nun das kontraktile Element durch ein aktives Element mit einem parallel geschalteten Dämpfer, als auch eine zu beiden seriell geschaltete Feder ersetzt (siehe Abbildung 2). Der Dämpfer wird in Abhängigkeit von der traktilen Kraft $F_{AE}$ eingestellt. <imgcaption image1 |Das Hill Modell (mod. nach Wiki-Projekt WP1208, Link:http://wiki.ifs-tud.de/biomechanik/projekte/ss2012/titin)>
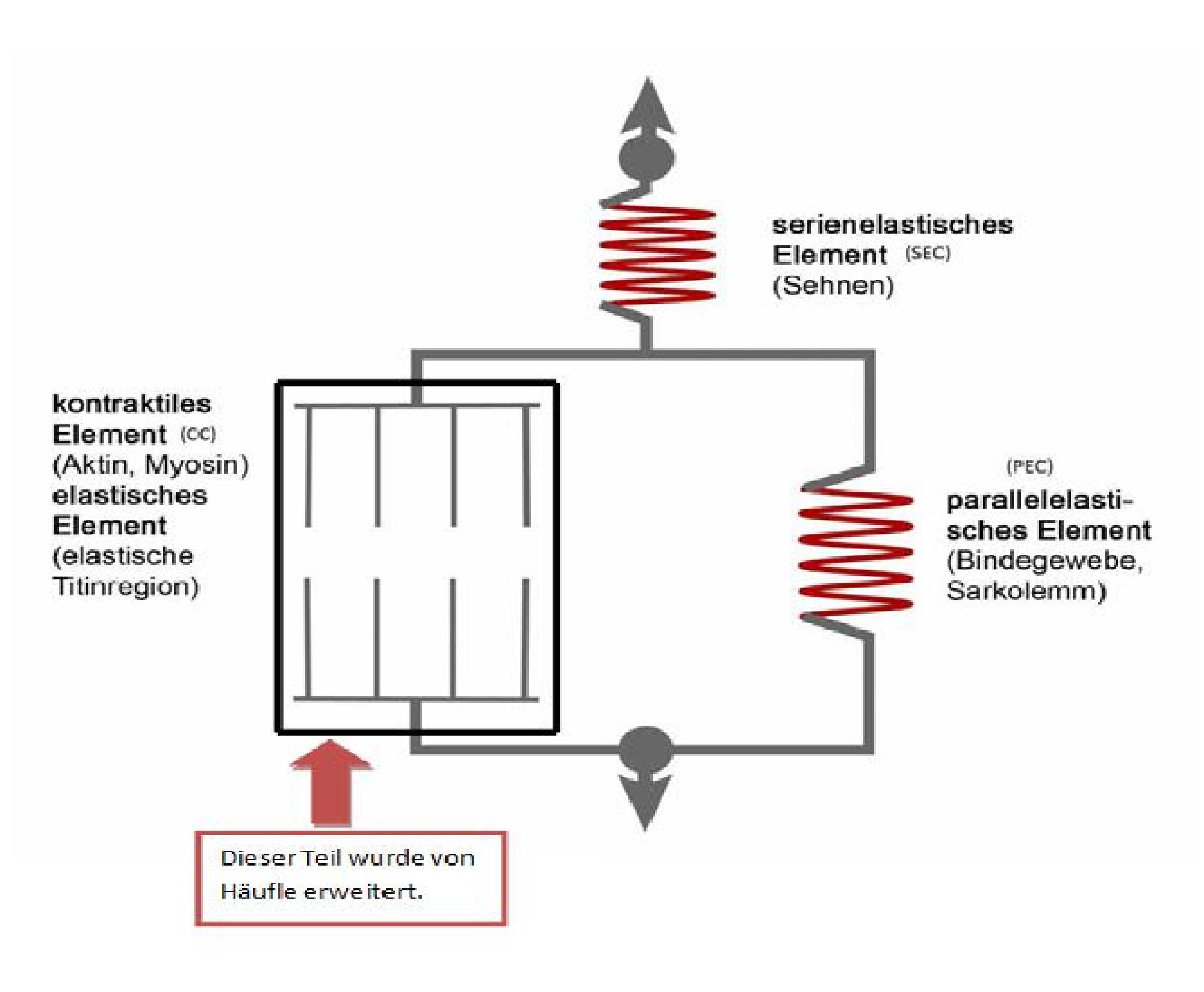 </imgcaption>
</imgcaption>
<imgcaption image2 |Das Häufle Modell (mod. nach Häufle, 2012, S. 213)>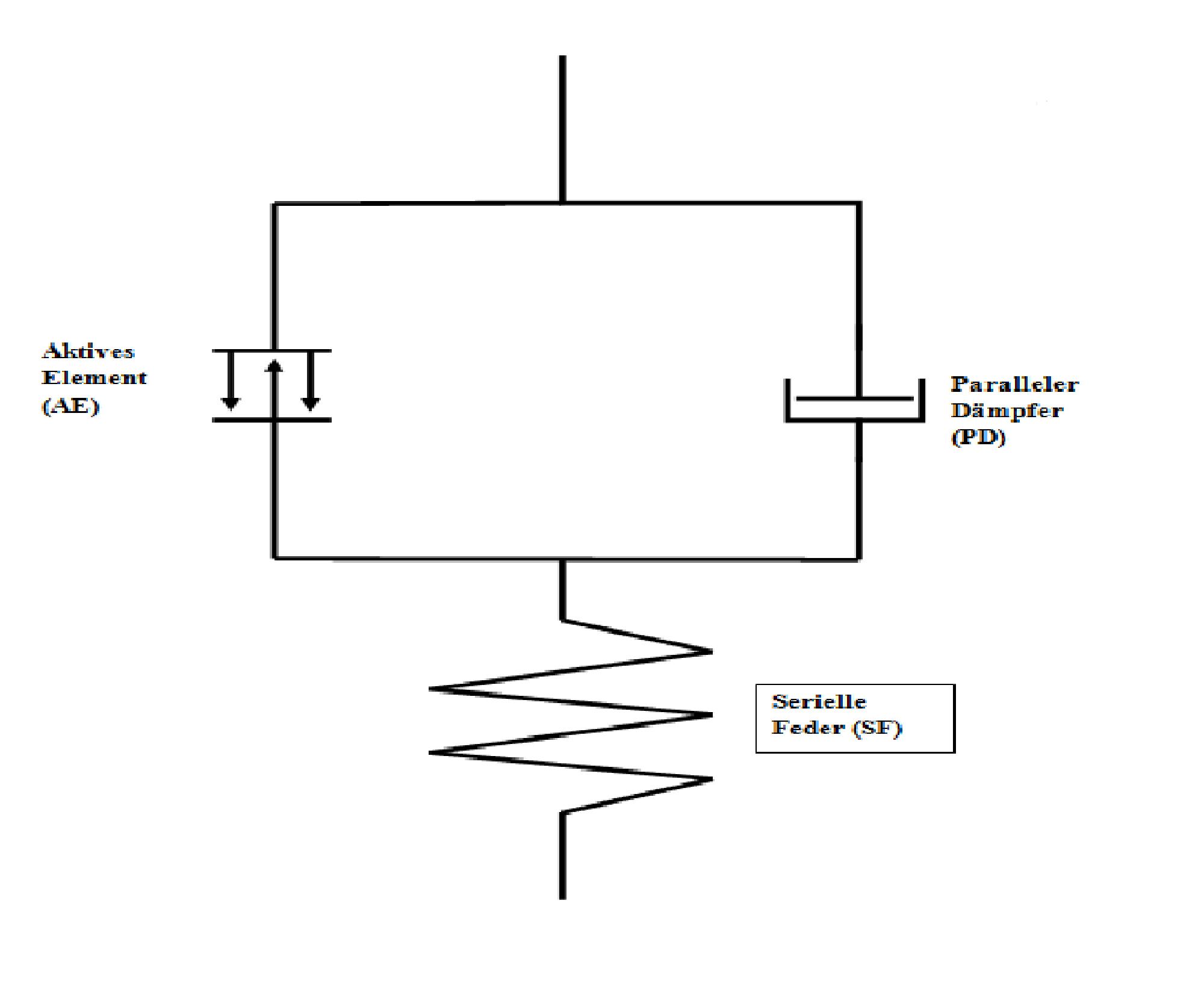 </imgcaption>
Das Kraft-Geschwindigkeit Verhältnis ist identisch mit der analytisch bestimmten und der biologisch gemessenen Kraft-Geschwindigkeit Verhätnis.
</imgcaption>
Das Kraft-Geschwindigkeit Verhältnis ist identisch mit der analytisch bestimmten und der biologisch gemessenen Kraft-Geschwindigkeit Verhätnis.
Quellen
Zu näheren Informationen zum Muskel Modell nach Häufle wird hier sein veröffentlichtes Skript angeboten:haeufle12jbioniceng.pdf
Siehe Literaturverzeichnis
Weiter zu dem Marco Hopper indexmenu_n_0