Inhaltsverzeichnis
WPG1603 Car Crash Dummy
| Modul-Icon |  |
|---|---|
| Veranstaltung | Seminar Biomechanik (Justus-Liebig-Universität Gießen) |
| Autoren | Ben, Anton, Eva, Sarah |
| Bearbeitungsdauer | 60 Minuten |
| Präsentationstermin | 11.07.2016 |
| Zuletzt geändert | 04.07.2016 |
| Voraussetzungen | DYN1, GM3, GM4 |
Einleitung
Jeder hat sicherlich schon einmal ein Crash Test Video, wie im oben gezeigten Youtube-Video, gesehen und sich die Frage gestellt: „Wer ist diese tapfere Person, die sich immer wieder hinter das Steuer setzt?“ Es ist der Dummy, der dieser schmerzhaften Arbeit nachgehen darf. Mit Dummys sind aber keine dummen Menschen gemeint, sondern lebensgroße, bei Unfalltests in Kraftfahrzeugen verwendete Kunststoffpuppen. So ein Dummy ist aber viel mehr als eine Kunststoffpuppe. Er ist ein Messgerät, das häufig in Car-Crash-Tests zum Einsatz kommt, und somit seit 1949 maßgeblich für die Entwicklung und Verbesserung des Insassenschutzes verantwortlich ist. Neben dem Dummy wird die Autosicherheit mit Hilfe von Freiwilligen-, Leichen- und Tierversuchen getestet. Dabei existieren jedoch viele Probleme, die eine Übertragbarkeit der Testergebnisse einschränken. An Freiwilligen dürfen nur Versuche durchgeführt werden, die keine gesundheitsschädlichen Verletzungen verursachen. Leichen sind aufgrund ihres Alters oder ihrer körperlichen Vorschädigung ungünstig. Tiere besitzen einen anderen anatomischen Aufbau im Vergleich zum Menschen. Zudem kommen bei allen Testgruppen ethische Bedenken auf. Dummys besitzen gegenüber den biologischen Probanden einen weiteren, aus biomechanischer Sicht, wichtigen Vorteil. Sie sind reliabel und bieten quantitative Messdaten.
Dieses Wiki bietet einen Einblick in den heutigen Stand eines Crash-Test-Dummys. Dabei soll ein erster Eindruck verschafft werden und zunächst auf den Aufbau (Anthropometrie) eines Dummys eingegangen werden. Anschließend wird die Sensorik und die erhobenen Messdaten betrachtet (wie z.B. die Beschleunigung). Dadurch soll das Innenleben eines Dummys besser veranschaulicht werden. Abschließend wird auf die Schutzkriterien und die für den Menschen in einer Kollision ertragbaren Grenzen eingegangen. Begleitet wird das Wiki mit einem Datensatz und einem kleinen Matlab-Script, sodass zusätzlich der Umgang mit der Verarbeitung geübt werden kann.
Anthropometrie
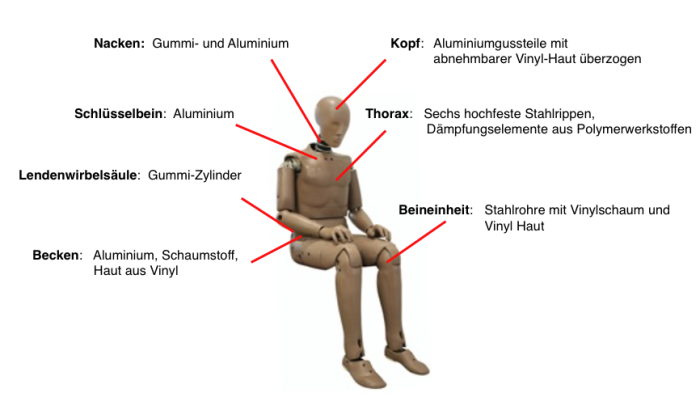
Derzeit gibt es über 20 verschiedene Dummy-Typen, die je nach Anwendungsbereich eingesetzt werden. Die Größe und Masse, sowie die Massenverteilung und das Bewegungsverhalten sollen weitgehend dem Menschen entsprechen (Simulationsgüte oder Biofidelität). Die Dummys sollen schließlich das gleiche Bewegungsverhalten und die gleichen Steifigkeits- und Dämpfungseigenschaften wie ein Mensch bei einem Aufprall während eines Unfalls zeigen. Das Skelett eines Dummys besteht normalerweise aus Metall oder Kunststoff. Die Körperteile sind über Gelenke miteinander verbunden. Die Muskeln und Weichteile bestehen aus Kunststoffschaum und die Körperoberfläche aus einer abnehmbaren Kunststoffhaut. Der am häufigsten in der Automobilindustrie verwendete Dummy ist der Hybrid III eines 50-perzentile Mannes (Abb. 1) (d. h. 50% der männlichen Population sind kleiner als der 50-perzentile-Wert).
Der Hybrid III Dummy wird vor allem bei Frontalkollisionen von Fahrzeugen verwendet. Ferner wird der Hybrid III auch für Rollstühle, medizinische und sportliche Ausrüstung genutzt (Humanetics, 2016). Stehend hat er eine Größe von 1,75 m und ein Gewicht von 78,2 kg. Die anthropometrischen Daten stammen aus der US Population der 1960er Jahre und werden noch heute in der Entwicklung verwendet. Da die Anthropometrie eines Dummys bekannt ist, kann diese auch genutzt werden, um bei einem Test Schwerpunktverläufe von einzelnen Körpersegmenten zu verfolgen. Wie beim Menschen sind die Positionen der Segmentschwerpunkte bekannt (vgl. Kinematische KSP-Berechnung).
<spoiler | Segmentschwerpunkte und Segmentgewichte>
| Tab. 1. Die Daten beziehen sich auf einen Hybrid III Dummy in der aufrechten Sitzposition (vgl. Abb. 1) (nach Humanetics, 2016; Kaleps et al., 1988; National Highway Traffic Safety Administration, 2016). | ||||
| Segment | KSP [%proximal] | Masse [%] | Proximal | Distal |
|---|---|---|---|---|
| Kopf | 74,52 | 7,82 | Vertex | C7 |
| Rumpf | 46,07 | 51,78 | C7 | Hüfte |
| Oberarm | 39,10 | 2,57 | Schulter | Ellenbogen |
| Unterarm | 34,84 | 2,19 | Ellenbogen | Handgelenk |
| Hand | 35,14 | 0,73 | Handgelenk | Fingerspitze |
| Oberschenkel | 54,50 | 7,71 | Hüfte | Knie |
| Unterschenkel | 44,32 | 5,52 | Knie | Fußgelenk |
| Fuß | 40,68 | 1,49 | Ferse | Fußspitze |
</spoiler>
Weitere Dummy-Typen sind beispielsweise die 5-perzentile Frau (1,51 m, 49,1 kg) und der 95-perzentile Mann (1,87 m, 101,2 kg) für kleine bzw. große Personen. Auch Dummy-Typen für Kinder im Alter von 12 Monaten (0,75 m, 10,0 kg), 3 Jahren (0,94 m, 15,5 kg) und 6 Jahren (1,14 m, 23,4 kg) sind vorhanden.
Sensorik
Im folgenden Kapitel werden die spezifischen Sensoren eines Hybrid III Dummys und eine exemplarische Durchführung einer Messauswertung in Matlab vorgestellt. Die Messung lässt sich grob in drei Schritte gliedern (vgl. Abb. 2). Vorab der eigentlichen Messung findet die Kalibrierung und in diesem Zuge die Berechnung des Umrechnungsfaktors statt, mithilfe dessen in der Nachbearbeitung die einzelnen Messsignale in eine Messgröße umgerechnet werden.

Messtechnik
Versuche mit Dummys sollen Aufschluss über die einzelnen Dimensionen der Verletzungen von Personen bei einem Unfall geben (Kramer et al., 2013). Dieser Schweregrad wird durch die gemessenen Signale aus den im Dummy verbauten Sensoren bestimmt. Dabei stellen die Sensoren einen wesentlichen Teil einer Messkette dar, wie sie in Abbildung 3 dargestellt ist.

Die unterschiedlichen Arten von Sensoren beziehen sich jeweils auf spezifische physikalische Größen und wandeln diese in eine elektrische Größe um. Eine physikalische Größe setzt sich aus einer quantitative Aussage (Zahlenwert) und einer qualitative Aussage (Einheit) zusammen. Diese Aussagen über eine physikalische Größe beschreiben ein Objekt, dessen Zustand, Merkmal, oder die Änderung dieser. Grob lässt sich sagen, dass die Aufgabe des Messsensors die Erfassung eines Eingangssignals über die Zeit und die Umwandlung in ein Ausgangssignal über die Zeit ist. (Lerch, 2012)

Die Sensoren können je nach Beschaffenheit die Veränderung der jeweiligen physikalische Größe im Raum messen. Die gemessenen Werte werden in ein für jedes Körpersegment festgelegtes Koordinatensystem übertragen. Dieses wird anhand der Lage der Körpersegmente durch die Aufstellung einer Ebene bestimmt. Hierbei wird der Ursprung des Koordinatensystems an das jeweilige Messobjekt angepasst. Die am Ende des Kapitels in Tabelle 2 verdeutlichten Kanäle der einzelnen Sensoren beziehen sich auf ein Koordinatensystem, bei dem die Z-Achse die Änderung in medial-lateral verdeutlicht, die X-Achse die Änderung in frontal-dorsal und die y-Achse die Veränderung in cranial-caudal (Humanetics, 2016). Exemplarisch ist nachfolgend die Ausrichtung der Achsen für den Kopf dargestellt. Als Ursprung wurde der Segmentschwerpunkt des Kopfes gewählt, der mithilfe der in Tabelle 1 aufgeführten Daten berechnet werden kann. (vgl. Kinematische KSP-Berechnung).
Physikalische Größen, die durch die im Hybrid III Dummy verwendeten Sensoren gemessen werden, sind die Beschleunigung, die Kraft, der Druck und der Weg.
Messaufnehmer
Beschleunigungsaufnehmer
Die physikalische Größe der Beschleunigung (a) lässt sich als die Änderung des Geschwindigkeitsvektors über die Zeit beschreiben (a= Δv/Δt) und hat die Einheit m/s². Sie steht in unmittelbaren Zusammenhang mit dem ersten und zweiten newtonischen Axiom (F = m×a), die im Wikimodul DYN1 Bewegungsgesetze näher erläutert werden. In den Beschleunigungsaufnehmern ist eine träge, sogenannte seismische Masse verbaut. Sie steht unmittelbar oder über ein Federsystem mit dem Beobachtungsgegenstand in Kontakt. Durch das Wirken einer Beschleunigung auf den Körper kommt es zur Bewegung der seismischen Masse relativ zur Gegenstandsmasse. Diese Änderung dient als Grundlage für die Beschleunigungsmessung. Die in Dummys am häufigsten verwendeten Beschleunigungsmesser basieren auf dem Messprinzip von piezoresistiven Elementen. Vereinfacht dargestellt ändern sie ihren „elektrischen Widerstand entsprechend der mechanischen Belastung“ (Kramer et al., 2013, S. 382). Laut dem Grundgesetz der Dynamik ist die mechanische Belastung proportional zur Beschleunigung. Somit führt die Änderung des elektrischen Widerstandes unter Einbeziehung des Ohmschen Gesetz (Spannung „U“ = Widerstand „R“ × Stromstärke „I“) zu einer Spannungsänderung proportional zur Beschleunigungsänderung. Dieses von der Beschleunigung abhängige Spannungssignal zu jedem Zeitpunkt beschreibt das elektrische Ausgangssignal eines Beschleunigungsaufnehmers. Da die Beschleunigung relativ zur Erdbeschleunigung gemessen wird, weist ein Körper im Ruhezustand eine vertikale Beschleunigung von -9,81 m/s² (= 1g) auf, gemessen mit einem Beschleunigungsaufnehmer. (Kramer et al., 2013)
Kraftaufnehmer
Die physikalische Größe Kraft (F) steht in einer engen Kausalität mit der Beschleunigung, ausgedrückt im Grundgesetz der Dynamik. Qualitative Aussagen über die Kraft werden in Newton angegeben (N = kg*m/s²). Das Messprinzip der Kraft, durch einen Dehnungsmessstreifen oder piezoresistives Element, ähnelt dem der Beschleunigung. Durch eine Verformung (Dehnung oder Stauchung) eines Körpers kommt es zur Änderung des Widerstandes und folglich zu einer Spannungsänderung, die sich proportional zur Kraft verhält. (Kramer et al., 2013)
Druckaufnehmer
Druck (P) lässt sich als die einwirkende Kraft (F) auf eine definierte Fläche (A) beschreiben. Die Formel für die physikalische Größe Druck lautet P = F/A mit der Einheit Pascal (Pa = N/m²). Die Messung erfolgt durch die Quantifizierung der Kraft durch Dehnungsmessstreifen die auf eine bestimmte Fläche angebracht sind. Wichtig für die Berechnung ist hierbei der Winkel, mit dem der Kraftvektor auf die Fläche auftrifft (Trigonometrie). (Kramer et al., 2013)
Wegaufnehmer
Mithilfe der Wegaufnehmer wird die Ortsveränderung (engl. displacement (D)) berechnet. Hierdurch werden Rückschlüsse auf Deformationen in Form von Eindrückungen gezogen. Diese Berechnungen erfolgen entweder durch die gemessenen Abstandsänderungen mithilfe von induktiven oder kapazitiven Sensoren, oder durch eine zweifache Integration der gewonnen Daten aus der Beschleunigungsmessung (vgl. Numerische Integration). (Kramer et al., 2013)
Sensoren im Hybrid III
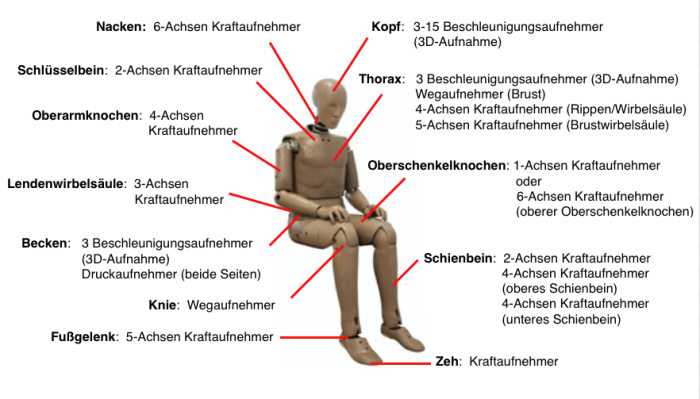
In unserem exemplarisch vorgestellten Dummy, dem Modell Hybrid III, finden die bereits vorgestellten Sensoren an spezifischen Körpersegmenten ihre Anwendung. Sie liefern die entsprechenden Messdaten zur Berechnung der jeweiligen Verletzungsschwere.
<spoiler | Genauere Erläuterung der verbauten Sensoren>
| Tab. 2. Die Daten beziehen sich auf einen Hybrid III Dummy (nach Schmitt et al., 2009; Kramer, 2013; Humanetics, 2016). | |||
| Körperteil | Sensoren | Kanäle | Mögliche Messung |
|---|---|---|---|
| Kopf | Drei-axialer Beschleunigungsaufnehmer (piezoresistiv, bis zu 15 Stück) | Ax, Ay, Az (5X Ax, Ay, Az Kopfrotation) | Translatorische als auch orthogonale, rotatorische Beschleunigung im Kopfschwerpunkt über drei Achsen |
| Nacken | • Sechs-axialer Kraftaufnehmer am oberen und unteren Hals | Fx, Fy, Fz, Mx, My, Mz | Rotation, dynamische Flexions- / Extensionsmoment, Biegemomente, Biegewinkel, Kompressionen und Scherkräfte (piezoresistive Aufnehmer mit einer oder mehreren axialen Komponenten) |
| Thorax | • 3 Beschleunigungsaufnehmer (3D-Aufnahme) • Wegaufnehmer (Brust) • Vier-axialer Kraftaufnehmer (Rippen/Wirbelsäule) • Fünf-axialer Kraftaufnehmer (Brustwirbelsäule) | Ax, Ay, Az (Brust Beschleunigung) Dx Fx, Fy, Fz, My Fx, Fy, Fz, Mx, My | Kraft-Verformung des Brustkorbs (Drehpotentiometer oder kapazitive bzw. induktive Wegaufnehmer), Beschleunigungen Brustbein |
| Oberarmknochen | Vier-axialer Kraftaufnehmer (rechts und links) | Fx, Fy, Mx, My | Risikoeinschätzung von Knochenbrüchen |
| Schlüsselbein | Zwei-axialer Kraftaufnehmer (rechts und links) | Fx, Fz | Interaktion mit Sicherheitsgurt |
| Lendenwirbelsäule | Drei-axialer Kraftaufnehmer | Fx, Fz, My | Druck auf die Lendenwirbelsäule |
| Becken | • Drei-axialer Beschleunigungsaufnehmer • Druckaufnehmer auf beiden Seiten des Beckenkamms | Ax, Ay, Az Fx (3 pro Seite) | Drehwinkel aus rotatorischen Beschleunigungen Messung von Kräften und Eindrückungen bei lateralen Belastungen |
| Oberschenkelknochen | Ein-axialer Kraftaufnehmer für Oberschenkel-Längskraft oder Sechs-axialer Kraftaufnehmer | Fx (pro Bein) Fx, Fy, Fz, Mx, My, Mz (pro Bein) | Biegemomente/Rotation relativ zur Hüfte, Risikoeinschätzung von Knochenbrüchen |
| Knie | Wegaufnehmer | Dx (pro Knie) | Verletzungen der Ligamente, Scherkräfte |
| Schienbein | • Zwei-axialer Kraftaufnehmer • Vier-axialer Kraftaufnehmer (obere Tibia) • Vier-axialer Kraftaufnehmer (untere Tibia) | Fz (pro Bein) Fx, Fz, Mx, My (pro Bein) Fx, Fy, Mx, My (pro Bein) | Risikoeinschätzung von Knochenbrüchen |
| Fußgelenk | Fünf-axialer Kraftaufnehmer | Fx, Fy, Fz, Mx, My (pro Bein) | Druck auf Ferse, Bewegungsumfang des Knöchels |
| Zeh | Kraftaufnehmer | Fz (pro Fuß) | Druck auf Zehen |
</spoiler>
Messwertverarbeitung
Kalibrierung und Umrechnung
Um Aussagen über die gemessene elektrische Größe treffen zu können, wird der Zusammenhang der elektrischen und physikalischen Größen mittels verschiedener Messungen ermittelt. Dies erfolgt zu Beginn der eigentlichen Messungen (Vorbearbeitung) und über die Aufstellung einer Regression. Die Kausalität wird bei einem linearen Zusammenhang durch einen konstanten Umrechnungsfaktor ausgedrückt. Mithilfe des Faktors können anhand der während der Messung aufgenommenen elektrischen Messwerte Aussagen über die physikalische Messgröße zu jedem Zeitintervall getroffen werden. Diesen Vorgang nennt man Kalibrierung, der vor jedem erneuten Aufbau der Messkette durchgeführt werden muss. <spoiler | Matlabscript Kalibrierung> Um die Regression zu ermitteln, muss zunächst eine bekannte Messgröße erfasst werden. Im Falle eines separaten Beschleunigungsaufnehmers stellt dabei die konstante Erdbeschleunigung (9,81 m/s²) eine geeignete Messgröße dar. Hierzu wird während der Messung jede Achse des Aufnehmers einmal parallel in Richtung der Erdbeschleunigung, parallel in entgegengesetzter Richtung und senkrecht zur Erdbeschleunigung gehalten. Im folgenden Matlabscript wird exemplarisch für die x-Achse gezeigt, wie die anschließende Umrechnung durchgeführt werden kann.

</spoiler>
Filter
Die aufgenommenen Messignale unterliegen verschiedensten elektrischen Störfaktoren, die als Rauschen (engl. noise) bezeichnet werden und aufgrund derer ohne Filterung keine klare Aussage über einen spezifischen Messwert gemacht werden kann. Durch die Filterung kommt es zur Reduzierung dieser Störsignale. Beim sogenannten Butterworth-Filter geschieht dies, indem Grenzfrequenzen festgelegt werden, sodass aufgenommene Messignale mit Frequenzen oberhalb/unterhalb (Tiefpass-/Hochpassfilter) dieser Grenzen in ihrer Amplitude gedämpft werden. Die Dimension dieser Dämpfung wird durch die Angabe der Ordnung des Filters bestimmt. Grenzfrequenzen werden üblicherweise je nach Art des Messobjekts festgelegt. Willentliche menschliche Bewegungen können maximale Frequenzen von 8 Hz erreichen (Fingerbewegung), sodass der Wert der üblich genutzten Grenzfrequenz bei menschlichen Bewegungen bei 10 Hz liegt (Kern et al., 2008). Die herkömmlichen Grenzfrequenzen für die Beschleunigungsmessung bei Kollisionstests liegen je nach Körpersegment zwischen 360 Hz bis 2000 Hz (vgl. Kramer et al., 2013, S. 387). Die gefilterten Messdaten werden anschließend zur Berechnung des Schweregrads der Verletzung genutzt, welche im nächsten Kapitel näher erläutert werden.

<spoiler | Matlabscript Filterung + Messdatei> An dieser Stelle steht folgende Messdatei: messung.txt zum Herunterladen und Selbstprobieren bereit. Dabei wird nun ein Matlabscript präsentiert, das in das Einlesen, die Filterung und die Berechnung des HIC aufgeteilt ist.
Der erste Teil besteht aus dem Einlesen und Anpassen der Datei. In diesem Fall liegt eine txt-Datei mit nur einer Zeile vor, welches das Einlesen vereinfacht. Der Zeitvektor dient zur passenden Skalierung in der graphischen Ausgabe. Dieser läuft vom ersten Messzeitpunkt dt über dt Schritte bis zum letzten Messwert length(G). Am Ende dieses Teiles wird bereits der erste Plot ausgegeben, der zunächst die ungefilterten Werte anzeigt.

Im nächsten Schritt wird ein Filter auf die Messdatei angewandt. Dabei wird zunächst die Frequenz unter Einhaltung des Nyquist-Theorems berechnet. Dieses besagt, dass alle abgebildeten Frequenzen nur halb so groß wie die Messfrequenz sein dürfen. Unter Grenzfrequenz wird die Frequenz gewählt, ab welcher der Filter wirken soll. Anschließend wird mit butter ein Butterworth-Filter gebildet und mit filter angewandt. Hier wird ebenfalls zum Schluss ein Plot ausgegeben, der diesmal die gefilterten Werte anzeigt. An dieser Stelle kann gerne zum Verständnis die Grenzfrequenz verstellt werden, um Veränderungen im Filter beobachten zu können. Es sollte jedoch beachtet werden, dass zur späteren Berechnung des HIC eine Grenzfrequenz von 1650 Hz vorgeschrieben ist.
 </spoiler>
</spoiler>
Skalierung von Verletzungen
Der AIS (Abbreviated Injury Scale) ist eine international anerkannte Kategorisierung der Verletzungsgrade bei Unfällen. Dieser Katalog wird der Körper in die Regionen Kopf, Hals, Thorax, Abdomen und Beckeninhalt, Wirbelsäule, Extremitäten und knöchernes Becken eingeteilt. Die beobachteten Verletzungen werden mittels der Kriterien
- Grad der Lebensbedrohung,
- Behandlungsdauer,
- Dauerschäden,
- Energieaufnahme und
- Häufigkeit einer Verletzung
einem Verletzungsschweregrad zugeordnet.
Die Verletzungsgrade teilen sich in einer Skala von null bis neun auf. Dabei entspricht
0 = unverletzt,
1 = gering,
2 = mäßig,
3 = schwer, nicht lebensgefährlich,
4 = bedeutend lebensgefährlich, Überleben wahrscheinlich,
5 = kritisch, Überleben unsicher,
6 = maximal, als praktisch nicht überlebbar gewertet,
9 = unbekannt.
Zur besseren Bewertung der Mortalität Mehrfachverletzter wurden auf Basis des AIS einige Verfahren der Berechnung entwickelt, auf die hier nicht weiter eingegangen wird.
Schutzkriterien
Die biomechanische Forschung ist daran interessiert zu ermitteln, welche Faktoren in ihren Kombinationen zu entsprechenden Verletzungen führen. Dabei wäre es optimal, einen „funktionellen Zusammenhang zwischen der mechanischen Einwirkung und dem Verletzungsergebnis bestimmen zu können“ (Kramer, 2009, S. 113). Dazu müssen Geschwindigkeiten, Beschleunigungen, Kräfte, Schwerpunktverschiebung (s.g. Unfallkenngrößen) und Materialien im Fahrzeug sowie dessen Bau in die Beobachtung eingehen. Je nach Material und Eigenschaften des Armaturenbretts können sich zum Beispiel beim Kopfanprall unterschiedliche Kopfverletzungen ergeben.
„Verletzungskriterien für die verschiedenen Körperregionen des lebenden Menschen werden in Schutzkriterien am Dummy, die in gesetzlichen Vorschriften und Sicherheitsstandards festgelegt sind, überführt“ (Kramer et al., 2013, S. 374).
Diese Schutzkriterien sind Belastungsgrößen, die am Dummy gemessen oder am mathematischen Modell errechnet werden. Das heißt: Was für den lebenden Menschen als Verletzungskriterium gilt, ist für den Dummy das Schutzkriterium. (Kramer, 2009)
Falls eine einzelne mechanische Größe zur Beschreibung des Schutzkriteriums nicht ausreicht, kann dieses auch aus mehreren Größen berechnet werden. Beispiel dafür ist das HIC-Kriterium (Head-Injury-Criterion) für den Kopf, welches sich aus der translatorischen und der rotatorischen Beschleunigung des Kopfes zusammensetzt. Das Schutzkriterien-Level stellt dabei die Ausprägung der im Test gemessenen mechanischen Größe dar. Für jedes Schutzkriterium gibt es mehrere Schutzkriterien-Levels, deren Höhe abhängig ist von der Testsituation und der Art des Dummys. Auch die Schutzkriterien-Levels sind durch gesetzliche Vorschriften gesichert, in Deutschland durch europäische Reglements wie z.B. das ECE-R 95 für Seitenkollisionen. (Kramer, 2009)
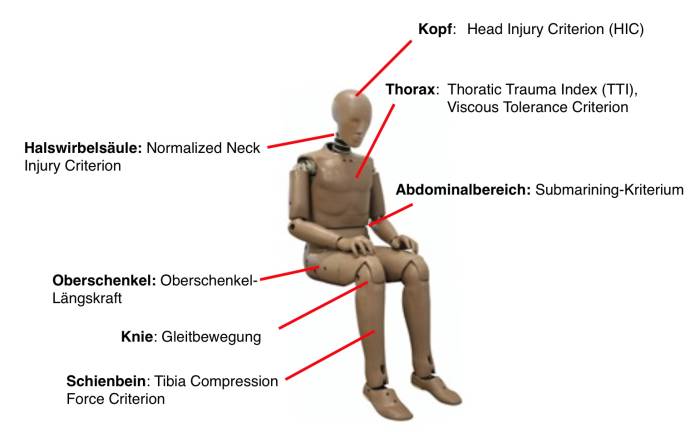
In der folgenden Tabelle sind einige der Schutzkriterien sowie deren Levels, welche die Obergrenze der tolerierbaren Messwerte am Dummy angeben, eingetragen. Die gesetzlichen Vorschriften bestimmen die Schutzkriterien-Levels in Abhängigkeit von Testsituation und Dummy-Typ.
| Tab. 3. Schutzkriterien und ihre Levels (nach Kramer, 2009). | |||||
| Körperteil | Schutzkriterium | Vorschrift | Schutzkriterien-Level | Bemerkung | |
|---|---|---|---|---|---|
| Kopf | Head Injury Criterion (HIC) | FMVSS 213 ECE-R 94 | $HIC_{36}$ = 1.000 | Berechnet aus der resultierenden Kopfbeschleunigung am Dummy | |
| Halswirbelsäule | Normalized Neck Injury Criterion | FMVSS 208 | $N_{ij}$ = 1,0 | Berechnet sich aus Hals-Zug- und -Druckkräften sowie dem Hals- Biegemoment | |
| Thorax | Thoratic Trauma Index (TTI) | FMVSS 214 | TTI=85/90g | Brust-Traumatisierungsindex bei Seitenkollisionen: 85 g bei vier-türigen, 90 g bei zwei-türigen Fahrzeugen | |
| Abdominalbereich | Submarining-Kriterium | FMVSS 214 | $a_{max}$=130g | Laterale Beckenbeschleunigung bei Seitenkollisionen | |
| Oberschenkel | ECE-R 94 | F = 9.070 N bei 0 ms F = 7.580 N bei > 10 ms | Oberschenkel-Längskraft gemessen mittels Kraftmessgliedern im linken und rechten Dummy-Oberschenkel | ||
| Knie | ECE-R 94 | s = 15 mm | Zulässige Gleitbewegung der Kniegelenke | ||
| Schienbein | Tibia Compression Force Criterion | ECE-R 94 | TCFC = 8.000 N | Maximale Kompressionskraft in axialer Richtung | |
<spoiler | Matlabscript Berechnung HIC> Nachdem mit dem vorherigen Matlabscript die Beschleunigungswerte ausgelesen und gefiltert wurden, wird hier nun das Matlabscript mit der Berechnung des HIC ergänzt. Hierzu wird nun die Formel $HIC = \left[ \frac{ 1 }{ t_{ 2 } - t_{ 1 }} \int_{t_{1}}^{t_{2}} a(t)dt \right]^{ 2,5 } \cdot \left( t_{ 2 } - t_{ 1 } \right)$ verwendet. Um die Berechnung zu erleichtern wird zunächst, ähnlich der Numerische Integration, eine Integration durchgeführt. Die eigentliche Formel wird in der for-Schleife berechnet und wird zur besseren Übersichtlichkeit in 2 Teile getrennt. Anhand des s lässt sich die Integrationszeit, also das zur Berechnung betrachtete Zeitfenster, auswählen. Auch hier kann zur Veranschaulichung das s verändert werden. Es sollte jedoch beachtet werden, dass zur Berechnung des HIC eine Integrationszeit von 0,015 s oder 0,036 s üblich ist. Im Anschluss wird ein Plot ausgegeben, der den zeitlichen Verlauf des HIC ausgibt. Zur Beurteilung wird jedoch nur das Maxima des HIC betrachtet, welches mit dem Schutzkriterien-Level aus Tabelle 3 verglichen werden kann.

Sofern alle Parameter eingehalten wurden, sollte folgender Wert für den HIC herauskommen: <spoiler | HIC = > 863,98 Hält der Aufprall das Schutzkriterium ein? </spoiler> </spoiler>
Die Ermittlung der Schutzkriterien
Um die Schutzkriterien ermitteln zu können, müssen zunächst die Belastungsgrenzen des Menschen bekannt sein. Diese können entweder am Computer simuliert werden (Numerische Simulation), oder aber im Versuch ermittelt werden. Es wird weiterhin in Versuche mit dem gesamten Dummy-Körper und vereinfachten Versuchen mit dessen Körpersegmenten unterschieden. Dabei sind diese Laborversuche auf Grund der hohen Variabilität von Parametern und Störfaktoren schwerer zu bewerten als Computersimulationen. Allerdings sind diese Computersimulationen auf reale Unfallsituationen nur bedingt übertragbar und benötigen eine immense Rechenleistung.
Numerische Simulation
Computersimulationen können helfen, durch eine detaillierte Modellierung Belastungen zu analysieren, die experimentell nicht zu bewerkstelligen wären. In der Praxis werden vor allem zwei Simulations-Typen verwendet: Das sogenannte Mehrkörpermodell („multi body system“) und die Finite Elemente (FE) Methode (vgl. Video).
Mehrkörpermodelle können Bewegungen des gesamten Körpers während einer Belastung gut simulieren. Der menschliche Körper wird dabei approximiert und über mehrere Starrkörper durch Gelenke verbunden.
Um eine detaillierte Analyse der Auswirkung eines Aufpralls auszuführen, kann die FE Methode verwendet werden. Ein Objekt wird dabei auf ein „diskretes numerisches Modell aus einzelnen Elementen (z. B. Dreiecke, Vierecke, Hexaedern, Balken)“ (Schmitt et al., 2009) reduziert. So kann beispielsweise die Spannungsverteilung im Gehirn während einer Kollision simuliert werden. Ferner können auch die in einem Crashtest an einem Dummy gemessenen Kopf-Belastungen als Randbedingung für die Simulation genutzt werden.
Diskussion
Obwohl der technische Fortschritt Unfallszenarien anhand von Testgruppen und Computersimulationen stetig optimiert und der Realität näher bringt, kann letztlich keine exakte Voraussage über Unfallhergänge getroffen werden. Zu viele individuelle und situativ bedingte Faktoren spielen eine Rolle. Die Schutzkriterien und deren Levels befinden sich daher in ständiger Diskussion z.B. bezüglich ihrer Übertragbarkeit auf die reale Unfallsituation. Letztlich ist es ein Versuch, den Menschen vor einer möglichst großen Anzahl von Unfallszenarien optimal zu schützen. Eine gewisse Unsicherheit bleibt aufgrund der Komplexität solcher Vorgänge bestehen. Zudem ist das primäre Interesse der Industrie, die Schutzkriterien zu erfüllen, um die Fahrzeugzulassung zu erhalten. Kriterien die gesetzlich nicht erfüllt werden müssen, aber dennoch für die Insassen von gesundheitlicher Relevanz sind, stehen in Gefahr, vernachlässigt zu werden. Daher ist der Gesetzgeber dafür verantwortlich, die Änderungen der Kriterien bedingt durch kontinuierliche Entwicklung der Schutzmöglichkeiten in den entsprechenden Katalog aufzunehmen.
Zusammenfassung und Ausblick
In dem Wiki Modul Car Crash Dummy wurde ein Einblick gegeben über die Geschichte des Dummys, seine Anthropometrie, die hinter dem Dummy steckende Sensorik und die Interpretation der Messwerte in Bezug auf die Schutzkriterien.
Der Dummy lässt sich als eine Messpuppe aus Aluminium, Stahl und Vinyl beschreiben, dessen Größe, Masse, Massenverteilung sowie sein Bewegungsverhalten weitestgehend dem Menschen entsprechen. Der am häufigsten in der Automobilindustrie verwendete Dummy ist der Hybrid III eines 50-perzentile Mannes. Mithilfe der im Dummy verbauten Sensoren werden physikalische Größen wie die Beschleunigung, die Kraft, der Weg und der Druck im Raum quantifiziert. Diese physikalische Größen werden durch die Messaufnehmer in elektrische Messingale umgewandelt, welche im späteren Verlauf der Messwertverarbeitung durch die Anwendung von Filtern bearbeitet werden. Mithilfe dieser verarbeiteten Messdaten wird das Schutzkriterien-Level in Bezug auf ein bestimmtes Körpersegment berechnet, welches Rückschlüsse auf Verletzungen und deren Grad am Menschen zulassen soll. Damit dies möglich ist, werden Verletzungen am Menschen nach verschiedenen Katalogen klassifiziert. Anschließend findet eine Überführung dieser Verletzungskriterien in Schutzkriterien am Dummy statt, welche in Deutschland durch europäische Reglements gesichert sind. Diese Schutzkriterien sind Belastungsgrößen, die am Dummy gemessen oder am mathematischen Modell errechnet werden. Das heißt: was für den lebenden Menschen als Verletzungskriterium gilt, ist für den Dummy das Schutzkriterium. Ergänzend zu den Dummyversuchen finden Computersimulationen statt, bei denen eine höhere Reproduzierbarkeit gewährleistet wird. Computersimulationen wurden in den letzten Jahren deutlich verbessert und profitieren auch von der zunehmenden Leistungsfähigkeit von Prozessoren. Dennoch ist ihre Entwicklung noch nicht abgeschlossen und bildet ein Zukunftsfeld für die Forschung. Die Einführung virtueller Testverfahren in die allgemeinen Standards der Fahrzeugsicherheit wäre eine Konsequenz, dieser Entwicklung entgegenzukommen. Die Unfallforschung, insbesondere die Forschung mit Car Crash Dummys, liefert einen wesentlichen Beitrag zum Fahrzeuginsassenschutz und hat bis heute bedeutende Schutzmöglichkeiten hervorgebracht.
Themenvorschläge für Folge-Wikis
- Computersimulation: Mehrkörpermodell („multi body system“) und die Finite Elemente (FE) Methode
- (Integrale) Fahrzeugsicherheit
- Insassenschutz: Rückhaltesysteme und Airbagsysteme
- Unfallrekonstruktion
- Side impact Dummy
- Rear impact Dummy
Fragen
<spoiler | 1. Frage: Welche Alternativen gibt es zu den Dummys? Und welche Vorteile bieten Dummys?> Alternativ zum Dummy wird noch mit Freiwilligen, Leichen und Tieren getestet. An Freiwillige können keinen gesundheitsschädlichen Tests durchgeführt werden, Leichen sind aufgrund des Alters und körperlicher Vorschädigungen ungünstig und Tiere besitzen einen anderen anatomischen Aufbau. Zudem sind Dummys reliabel und bieten quantitative Messdaten. </spoiler> <spoiler | 2. Frage: Welche Anwendungsfelder gibt es für Dummys?> Dummys werden in der Automobilbranche für Frontal-, Seiten- und Heckkollisionen, sowie für Fußgängeranprälle verwendet. Außerdem können sie für die Entwicklung von Rollstühlen und beim Testen von medizinischer und sportlicher Ausrüstung genutzt werden. Als Grundlage für Computersimulationen finden Dummys ebenfalls Verwendung. </spoiler> <spoiler | 3. Frage: Erläutere eines der Schutzkriterien! Gehe näher auf das betreffende Körperteil und die Eigenschaften ein!> Beispiel TTI: Der Thoratic Trauma Index bezieht sich auf den Thorax und beschreibt mit dem entsprechenden Schutzkriterien-Level die Belastung, die auf den Dummy in der Seitenkollision maximal wirken darf. Bei vier-türigen Fahrzeugen sind dies 85g, bei zwei-türigen 90g. Dies ist gesetzlich in der Vorschrift FMVSS 214 verankert. </spoiler> <spoiler | 4. Frage: Beschreibe den Ablauf, wie aus einer Aufnahme einer physikalischen Größe ein dazugehöriges Schutzkriterium berechnet werden kann!> Zuerst wird eine Kalibration durchgeführt. Dabei wird eine bekannte physikalische Größe gemessen und mit Hilfe einer linearen Regression die Koeffizienten zur Umrechnung von elektrischer in physikalischer Größe berechnet. Im Anschluss wird das Signal gefiltert um hochfrequente Störeffekte, wie z.B. das Rauschen, zu minimieren. Im Falle des HIC nehmen wir einen Butterworth-Lowpass-Filter mit einer Grenzfrequenz von 1650 Hz. Abschließend wird der HIC mit der Formel $HIC = \left[ \frac{ 1 }{ t_{ 2 } - t_{ 1 }} \int_{t_{1}}^{t_{2}} a(t)dt \right]^{ 2,5 } \cdot \left( t_{ 2 } - t_{ 1 } \right)$ berechnet. Dabei gilt, dass der höchste Wert des HIC zur Beurteilung des Schutzkriteriums betrachtet wird. </spoiler>
Literatur
- Bubb, H., Bengler, K., Grünen, R. E. & Vollrath, M. (2015). Automobilergonomie. Wiesbaden: Springer Fachmedien Wiesbaden.
- Burg, H. (2009). Handbuch Verkehrsunfallrekonstruktion (ATZ / MTZ-Fachbuch). Wiesbaden: Springer Fachmedien.
- Hering, E., Martin, R. & Stohrer, M. (2009). Taschenbuch der Mathematik und Physik. Berlin, Heidelberg: Springer Berlin Heidelberg.
- Haun, M. (2013). Handbuch Robotik. Berlin, Heidelberg: Springer Berlin Heidelberg.
- Humanetics. (2016). Zugriff am 09. Juni 2016 unter http://www.humaneticsatd.com/
- Institute of Electrical Measurement and Measurement Signal Processing (1999). Zugriff am 19. Juni 2016 unter http://www.emt.tugraz.at/publications/diplomarbeiten/da_untersweg/2_2Wegmessung.html
- Johannsen, H. (2013). Unfallmechanik und Unfallrekonstruktion. Wiesbaden: Springer Fachmedien Wiesbaden.
- Kaleps, I., White, Jr., R. P., Beecher, R. M., Whitestone, J. & Obergefell, L. A. (1988). Measurement of Hybrid III Dummy Properties and Analytical Simulation Data Base Development. Ohio: Harry G Armstrong Aerospace Medical Research Lab Wright-Patterson Afb OH.
- Kern, T. A., Marc Matysek, M.,Merkel, O., Rausch, J., Rettig, A., Röse, A. & Sindlinger, S.(2008). Entwicklung Haptischer Geräte: Ein Einstieg für Ingenieure. Berlin, Heidelberg: Springer Berlin Heidelberg.
- Kramer, F. (2009). Passive Sicherheit von Kraftfahrzeugen (ATZ / MTZ-Fachbuch). Wiesbaden: Springer Fachmedien.
- Kramer, F., Franz, U., Lorenz, B., Remfrey, J., Schöneburg, R. (2013). Integrale Sicherheit von Kraftfahrzeugen. Wiesbaden: Springer Fachmedien Wiesbaden.
- Lerch, R. (2012). Elektrische Messtechnik. Berlin, Heidelberg: Springer Berlin Heidelberg.
- National Highway Traffic Safety Administration. (2016). Zugriff am 24. Juli 2016 unter http://www.nhtsa.gov/Research/
- Schmidt, L., Grosche, J. & Schlick, C. M. (2008). Ergonomie und Mensch-Maschine-Systeme. Berlin, Heidelberg: Springer Berlin Heidelberg.
- Schmitt, K.-U., Niederer, P. F., Cronin, D. S., Muser, M. H. & Walz, F. (2014). Trauma-Biomechanik. Berlin, Heidelberg: Springer Berlin Heidelberg.
Bewertung des Wiki-Moduls
| Kategorie | Punkte | Anmerkungen |
|---|---|---|
| Inhalt (max. 10) | 10 Pkt | Praxisbezug und kreative Aufarbeitung, gute Einleitung, sehr umfangreiches Wiki (60min sind knapp bemessen) |
| Form (max. 5) | 5 Pkt | gute Übersichtlichkeit und strukturiert, Verlinkungen |
| Bonus (max. 2) | 0 Pkt | |
| Summe | 15/15 = 100% |