Inhaltsverzeichnis
WP1613 Exoskelett
| Modul-Icon |  |
|---|---|
| Titel | Exoskelett |
| Veranstaltung | PS Biomechanik |
| Autoren | Simon, Martin, Christian, Viktor |
| Bearbeitungsdauer | 50 Minuten |
| Präsentationstermin | 01.02.2017 |
| Zuletzt geändert | 14.02.2017 |
Einleitung
In Filmen wie Aliens (1986) oder Elysium (2013) tauchen Exoskelette auf und regen die Phantasie des Zuschauers an. In diesem Wiki-Modul möchten wir euch das Exoskelett näher bringen, um einige Fragen direkt oder indirekt zu beantworten. Woher stammt der Begriff des Exoskeletts? Sind filmische Kreationen nur eine Fiktion oder schon Realität? Wir starten mit der geschichtlichen Einordnung des Themas, um zu verstehen wer die Entwicklung anstieß. Es folgt ein grober Überblick zum Design eines Exoskeletts, der nicht das Ziel hat einzelne Bauteile zu erläutern, sondern ein Konzept mit Vertiefungen zum Material, der menschlichen Schnittstelle und der Steuerung zu liefern. Wir zählen zwar viele Bauteile auf und versuchen auf weiterführende Informationen zu verweisen, aber der Leser entscheidet selbst wie tief er in die Materie einsteigt.
Einführendes Beispiel
Exoskelette treten häufig in Science-Fiction Büchern (Starship Troopers von R. Heinlein) oder Filmen in Erscheinung. Um einen Kontrast zwischen der „filmischen Realität“ und dem heutigen Stand der Technik zu erzeugen, gibt es zwei kurze YouTube-Videos vorab. Zuerst einen actiongeladenen Ausschnitt aus dem Film Aliens (1986) mit der Protagonistin Ellen Ripley (Sigourney Weaver), die den Aliens den Kampf mit ihrem futuristischen Gabelstapler angesagt hat (Bogue, 2009, S. 421).
Im Vergleich dazu eine Präsentation des HAL und Erläuterungen seines Erschaffers.
Der Begriff des Exoskeletts
Exoskelette sind mechanische Geräte, die dem menschlichen Körper nachempfunden (menschenähnlich) sind und von einem Benutzer getragen/gesteuert werden. Sie liegen eng am Körper an, sodass Bewegungen parallel bzw. synchron nachgeahmt werden können. Grundsätzlich wird der Begriff Exoskelett verwendet, wenn es sich um eine Verbesserung/Steigerung der körperlichen Leistungsfähigkeit handelt, wobei der Begriff Orthese typischerweise genutzt wird, um Geräte zu beschreiben, die Personen mit Pathologien der Extremitäten unterstützt (Herr, 2009).
Der Begriff des Exoskeletts wird auch in der Biologie verwendet, um eine Struktur zu charakterisieren, die einen passiven Schutz bzw. unterstützende Hülle eines Organismus beschreibt (Herr, 2009).
Geschichte der Exoskelette
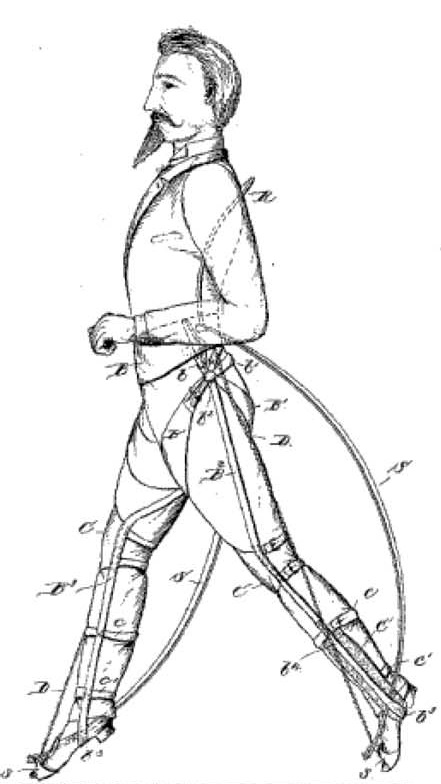
Yagn's running aid
Das erste Exoskelett taucht im Jahre 1890 in einem Patentantrag des Nicholas Yagn auf. Es besteht aus zwei Blattfedern, die parallel zu den Beinen angeordnet sind, um die Laufgeschwindigkeit der Infanterie zu verbessern. Einerseits soll das Gewicht des Trägers durch das Exoskelett beim Bodenkontakt abgefangen werden und andererseits soll die Konstruktion während des Abdrucks beim Laufen unterstützen. Nach Herr (2009) gibt es keine Aufzeichnungen darüber, ob Yagn’s running aid jemals gebaut und demonstriert worden ist.

Hardiman (Human Augmentation Research and Development Investigation) der Firma General Electric
Das Verteidigungsministerium der USA beschloss 1965 die Entwicklung eines Exoskeletts, welches dem Träger ermöglichen sollte 682 kg zu heben, voranzutreiben. Im Jahre 1970 war einer der Arme fertiggestellt, welcher die Spezifikationen erfüllte und 341 kg hob, aber selbst ein Eigengewicht von 750 kg auf die Waage brachte. Das Projekt wurde schließlich eingestellt, da es fundamentale Probleme mit der Technologie gab, die nicht zu bewältigen waren (Bogue, 2009, S. 421).

BLEEX (Berkeley Lower Extremity Exoskeleton)
Professor Kazerooni entwickelte ab dem Jahre 2001 an der Universität Berkeley in Kalifornien das Exoskelett BLEEX, das beim Bewältigen von Lasten unterstützt und damit Rücken- bzw. Beinverletzungen vorbeugt. Das Exoskelett besitzt drei Freiheitsgrade (degrees of freedom) in der Hüfte, einen im Knie und drei am Fuß. Die entscheidende Innovation war jedoch die energetische Autonomie, die das BLEEX mit seiner eigenen, tragbaren Energieversorgung herstellte (Herr, 2009).

HAL (Hybrid Assistive Limb)
Das erste Exoskelett, das keinen militärischen Hintergrund besitzt, ist an der Universität Tsukuba unter der Leitung von Yshiyuki Sankai entwickelt worden. Die kommerzielle Firma, die den HAL vertreibt, Cyberdyne, Inc wurde 2004 gegründet. Die Ziele des Anzuges sind die Vereinfachung der Rehabilitation, Arbeitern bei schweren Lasten zu unterstützen und der Einsatz in Katastrophensituationen. Das Gewicht des HALs beträgt 23 kg und dieser enthält eine 100 V Wechselspannungsbatterie, welche Elektromotoren ca. drei Stunden antreibt und die Fortbewegung ermöglicht (Bogue, 2009, S. 423).
Design des Exoskeletts
Aktoren/Aktuatoren (Actuators)
Als Antriebselemente können verschiedene physikalische Prinzipien genutzt werden. In der Robotik werden pneumatische, hydraulische, elektrische, elektrisch aktive Polymere (Künstliche Muskeln) und weitere Aktoren verwendet. Einige von diesen können nicht als Antrieb eines Exoskeletts fungieren, da die geforderten Drehmomenten bzw. Geschwindigkeiten nicht erreicht werden (Hong et al., 2013, S. 520-521).
Beispiele: BLEEX - hydraulisch, HAL - pneumatisch/elektrisch
Mensch-Exoskelett-Schnittstelle
Die Mensch-Exoskelett-Schnittstelle kann mit Hilfe verschiedener Bauteile erfolgen. In Exoskeletten werden Beschleunigungssensoren (Beschleunigungssensoren im Sport), Kraftsensoren, Dehnungsmessstreifen, Elektromyographie (EMG - Aufbau und Funktion des Muskels) und Gyroskope eingesetzt (Hong et al., 2013, S. 521). In einem weiteren Abschnitt werden wir vertiefend auf die Schnittstelle eingehen.
Beispiele: BLEEX - Beschleunigungssensoren/Kraftsensoren, HAL - EMG/Beschleunigungssensoren für die Haltung
Mechanisches Design
Hong et al. führen fünf Designkriterien für ein Exoskelett auf (2013, S. 521):
1. Ergonomie und Komfort: Aktuelle Exoskelette sind unbequem zu tragen (Druckstellen bzw. wundreiben) und können aus diesem Grund nur für eine bestimmte Zeit genutzt werden (Herr, 2009).
2. Hohe Steuerbarkeit
3. Geringes Gewicht und stabile Struktur
4. Anpassbarkeit an den Träger: Jeder Mensch hat eine individuelle Anatomie und physiologische Anforderungen, daher sollte das Exoskelett eine hohe Anpassbarkeit besitzen und im Idealfall als „zweite Haut“ fungieren (Herr, 2009).
5. Sicherheit des Benutzers: Das Exoskelett muss in Notsituation, bei Fehlfunktion eines Sensors oder beim Ausbleiben der Energieversorgung richtig arbeiten - ein einfach zu erreichender Notfallausschaltknopf ist von Vorteil (Mikolajewski, 2011, S. 230).
Energieversorgung
Das größte Hindernis und wichtiger Designpunkt derzeitiger Exoskelette ist die Energieversorgung. Die Kapazität der Batterien hat sich in den letzten Jahre erhöht, sodass Exoskelette mit einer Ladung einige Stunden operieren können (Hong et al., 2013, S. 521-522).
Beispiel: HAL - Batterieversorgung (Lithiumbasis) hält zwei Stunden und 40 Minuten.
Klassifizierung
Die Körpersegmente (Mehrkörpersysteme) eines menschlichen Beines sind der Oberschenkel, Unterschenkel und der Fuß. Diese drei Glieder sind in Serie geschaltet bzw. aneinandergereiht. Exoskelette werden danach unterschieden, ob ein weiteres Element an die Extremität hinzugefügt wird (seriell) oder ob parallel zur menschlichen Gliedmaße ein mechanisches Konstrukt ergänzt wird. Darüber hinaus werden parallele Exoskelette nach ihrer spezifischen Funktionsweise klassifiziert.

Serielle Exoskelette
Serienelastische Elemente (Sehnen/Bindegewebe - Muskelmechanik) spielen eine wichtige Rolle in der Gangstabilität und –ökonomie des Menschen. Viele Säugetiere besitzen bestimmtes Gewebe, um den Aufprall von Stößen zu mildern und einen gewissen Teil dieser Energie zu speichern bzw. wieder abzugeben. Designer versuchen die Natur nachzuahmen und Exoskelette oder Schuhe nach diesem Vorbild zu entwerfen. Durch Geräte die seriell den menschlichen Körper „verlängern“, erhöht sich die Komplexität des System und der Körper muss mehr Energie aufwenden, um das System beim Laufen zu stabilisieren. Zwar steigt die Sprunghöhe des Trägers, aber der aufgeführte Umstand negiert den erhofften Energievorteil des PowerSkip Exoskeletts (Herr, 2009).
Parallele Exoskelette zum Lastentransfer
Anders als bei den seriellen Exoskeletten wird bei dieser parallelen Bauweise das Gewicht der Körpersegmente auf die Konstruktion bzw. letztendlich auf den Boden übertragen und reduziert somit die Last auf die menschliche Gliedmaße (Knochen, Muskel, Sehne). Aus diesem Grund wird der Energieaufwand beim Gehen, Laufen oder Hüpfen verringert und das System muss im Vergleich zu seriellen Exoskeletten nicht zusätzlich stabilisiert werden (Herr, 2009).
Beispiel: BLEEX
Parallele Exoskelette zur Drehmoments- und Arbeitssteigerung
In diese Klasse fallen alle Exoskelette die parallel zu den Gelenken des Menschen angeordnet sind und das Drehmoment bzw. Arbeit dieser erhöhen. Hier wird nicht nennenswert die Last (Gewicht) im Vergleich zum vorherigen Typus reduziert, sondern wie genannt das Drehmoment und die Arbeit (der Muskeln) durch zusätzliche Aktoren gesteigert. Deshalb wird dieses Prinzip in der Rehabilitation bei verschiedenen pathologischen Zuständen eingesetzt (Herr, 2009).
Beispiel: HAL
Parallele Exoskelette zur Erhöhung der Ausdauerleistung
Hunderte von Muskeln bewegen den Körper des Menschen und ermüden dabei. Daraus entstand die Idee für bestimmte Aktivitäten ein paralleles Exoskelett zu entwerfen, dass die Arbeitslast einzelner Muskeln auf eine größere Anzahl überträgt, um diese aufzuteilen und dadurch die Erschöpfung zu verlangsamen (Herr, 2009). Wir gehen nicht näher drauf ein und belassen es bei dieser theoretischen Darstellung.
verfasst von V. Stockum
Material
Nachdem ihr nun einen ersten Eindruck dazu bekommen habt, worum es sich bei Exoskeletten handelt, sollte vor dem vertiefenden Informationen zunächst eine Vorstellung dafür geschaffen werden, wie solche Exoskelette überhaupt Aufgebaut sind, bzw aus welchem Material. Hierfür werden, um ein wenig aus dem Bereich des Militärs zu kommen, vor allem Beispiele aus der Prothetik gewählt, also z.b. diverse Arm- und Beinprothesen.
Anmerkung: Da man bei dem Begriff der Prothese häufig an Schienen, Platten und Schrauben denkt, die im Körper liegen, soll hier nochmal auf den oberen Punkt 'Einführung' verwiesen werden. Dabei handelt es nämlich nicht um Exoskelette, sondern um so genannte Endoskelette und werden daher hier nicht aufgelistet!
Exoskelette im Bereich der Leistungssteigerung
Der Begriff der Leistungssteigerung soll so verstanden werden, dass es nicht darum geht, einen verletzten Menschen beim Heilungsprozess zu helfen (z.B. um sich langsam an das Gehen zu gewöhnen) oder amputierte Menschen kosmetische Prothesen zu geben. Wir betrachten hier den Einsatz bei gesunden Menschen, die z.B. im Militär tätig sind oder auch in der Industrie arbeiten, wo es äußerst nützlich ist, Hilfestellung von effizienten Maschinen zu bekommen.
Das Material
Zum Material selbst gibt es zunächst nicht viel zu sagen. Anfänglich werden solche Exoskelette aus Stahl hergestellt, was sich aber als ineffizient herausstellt, da Stahl ein schweres Metall ist, auf der anderen Seite wird auch Aluminium verwendet, welches zwar sehr leicht, jedoch auch äußerst instabil ist und dadurch u.a. das Verletzungsrisiko erhöht. Mit kommenden Fortschritt ist es nun so, dass häufig - logischerweise - möglichst leichtes Metall, bei möglichst größter Stabilität verwendet wird. Dabei handelt es sich in diesem Bereich häufig um Titan. Außerdem ist es durch komplexere Konstruktionsmethoden auch möglich z.B. mit Kohlenstofffaser zu arbeiten. Bemerkung: Kohlenstofffasern wird auch in der Luft- und Raumfahrt, sowie in Formel 1-Wagen verwendet. (Paradisi-Redaktion (2016); Wikipedia-Artikel 'Powered Exoskeleton' (2017))
Exoskelette in diesem Einsatzbereich sind häufig motorisiert und mehrgelenkig. Sie werden durch Elektromotoren, Pneumatik (Druckluft), Hydraulik, Hebel oder anderen komplexen Technologien angetrieben. Außerdem: Da es je nach Modell und speziellem Einsatzgebiet/ Gebrauch durchaus darin Variieren kann, was für Kabel oder (elastische) Federn und ähnliche Dinge gebraucht werden, werden diese der Einfachheit halber NICHT extra erwähnt. Dies würde den Rahmen sprengen. Selbiges gilt nicht nur für den „Leistungsbereich“, sondern für alle Exoskelette. (Stormie Garza, Jennifer Cao und Vijay Vaidyanathan; Wikipedia-Artikel 'Powered Exoskeleton' (2017))
Prothetik
Kurzer Ausblick in die Vergangenheit: Prothesen gab es bereits im Mittelalter. Das wohl bekannteste Beispiel dürfte das Holzbein sein. Ein anderes sehr bekanntest Beispiel ist 'Die eiserne Hand von Götz', wobei es sich um eine Kunsthand handelt, die Götz nach einem Kriegsunfall, nach eigener Idee, angebracht wurde - Eiserne Hände gab es zuvor schon, wurden durch Götz aber erst 'berühmt'
Die beliebtesten Materialien sind heutzutage PVC und Silikon:
PVC (Polyvinylchlorid): Es ähnelt menschlicher Haut am meisten, was vor allem Menschen, die es aus kosmetischen Gründen tragen zugute kommt. Es wird allerdings schnell schmutzig und muss alle paar Monate ausgetauscht werden
Silikon: Ist unverfärblich und schmutzabweisend. Reißt dafür relativ schnell und wird daher mit Nylon überzogen, damit es mehrere Monate hält. Der klare Nachteil macht sich hier im Preis bemerkbar, da es wesentlich teurer ist, als PVC.
Es gibt natürlich je nach betroffener Körperstelle immer Ausnahmen oder Kombinationen verschiedener Stoffe, die verwendet werden. Hier einige Beispiele:
Unterschenkelprothesen: Werden aufgrund besonders notwendiger Stabilität und geringem Gewicht aus Titan hergestellt.
Orthesen: Aus eben solchen Stoffen und/ oder Kohlenstofffaser - so ist es leicht, Orthesen unter den Klamotten zu tragen, damit sie von außen nicht sichtbar sind
Oberarmprothesen: Je nach Verletzungsgrad der Schulter und ob es sich um eine aktive Prothese handelt, reicht es hier nicht aus, nur einen Kunststoffkörper anzubringen. So werden z.B. zunächst Metalle wie Chrom oder Titan im Körper verankert und erst dann ein Kunststoffkörper angebracht. (Paradisi Redaktion (2016); Dr. Annika Wellmann-Stühring (2014))
verfasst von C. Ortu
Mensch–Exoskelett-Schnittstelle
Die symbiotische Beziehung, welche Roboter und Mensch bei einem Exoskelett haben, übersteigen einfache physikalische Wechselwirkungen bei Weitem. Sensoren, Aktoren, Algorithmen welche menschliche Bewegungen analysieren, verarbeiten und daraus lernen sind nur ein Teil der möglichen Steuerelemente einer Mensch-Maschine-Beziehung. Es wird Grundsätzlich in zwei verschiedene Mensch-Exoskelett-Schnittstellen unterschieden, nämlich die Geistige (cHRI= cognitive human-robot-interaction ) und die Körperliche (pHRI= physical human-robot-interaction).
Geistige Mensch-Roboter-Interaktion
Ein geistiger Prozessablauf von Aufgaben beinhaltet zuerst das Planen und dann die Umsetzung des zu bewältigendem Problems oder Ziels. Das cHRI lässt sich als geistige Brücke zwischen Mensch und Roboter verstehen, da beide Seiten Informationen zur Bewältigung einer Aufgabe brauchen.

Das Bild beschreibt den Ablauf der Mensch-Exoskelett-Schnittstelle in drei simplen Schritten.
1. Der Gedankengang und das Planen des Menschen
2. Die Aktivierung der Muskeln/Aktoren
3. Die Ausführung der Bewegung
Es gibt verschiedene Möglichkeiten, wie diese Informationen aufgenommen und an das Exoskelett weitergegeben werden kann. Z.B. können Informationen über Gedankengang und Planung durch Messung der Gehirnaktivität gewonnen werden oder man wertet die Aktivitäten im Muskel aus.
(Pons, 2008)
Körperliche Mensch-Roboter-Interaktion

Da Exoskelette als Erweiterungen, Unterstützungen oder Verstärkungen des menschlichen Körpers dienen soll, wird auch eine Körperliche Kopplung zwischen Mensch und Roboter gebraucht. Ein klassisches Beispiel für eine pHRI ist zum Beispiel ein Exoskelett mit der Funktion, ein bestimmtes Gelenk des Menschen zu unterstützen. Die Bewegungen beider Seiten müssen perfekt aufeinander koordiniert und abgestimmt werden, da es bei unerwartetem Verhalten einer oder beider Seiten zu schweren Verletzungen kommen kann.
Um dies zu garantieren, müssen alle Sensoren, Aktoren und Kontrollmechanismen darauf ausgelegt sein eine reibungslose Mensch-Roboter-Interaktion zu gewährleisten.
Wie auch bei der cHRI gibt es hier eine Vielzahl von Möglichkeiten die Aktoren mit Informationen zu versorgen. Sensoren, welche zum Beispiel die Verschiebungen der oberen Hautschicht messen, oder den Druck welcher auf ein bestimmtes Gelenk wirkt aufzeichnet, sind nur zwei Beispiele aus eine Vielzahl von Möglichkeiten eine physische Mensch-Roboter-Interaktion aufzubauen.
(Pons, 2008)
verfasst von S. Albrecht
Steuerung Exoskelett
An dieser Stelle wird deutlich weshalb Exoskelette auch als Wearable Robots bezeichnet werden. Sie entsprechen im Aufbau dem eines Roboters und nutzen die gleiche Steuerung.
Exoskelette bestehen aus einer Kette von Gelenken, welche ein Körperteil (wie z.B. Arme oder Beine) nachstellen und unterstützen. Im Rahmen der mechanischen Eigenschaften der Gelenke können Bewegungen ausgeführt werden.
Zur Steuerung werden die aus der Robotik bekannten Kinematikmodelle der direkten und inversen Kinematik verwendet.
Kinematikmodell
Für die Berechnung legt man an jedem der n Gelenke ein Koordinatensystem an. Mathematisch betrachtet werden n+1 lokale Koordinatensysteme eingeführt. Begonnen an der Basis(z.B. Hüfte) bis hin zum Endeffektor(z.B. Fuß).

Quelle: http://robotics.stackexchange.com/questions/8426/denavit-hartenberg-parameters-3dof-articulated-manipulator Zugriff am 18.01.2017
Zur Berechnung der Koordinaten des Endeffektors wird die lokale Koordinatentransformation vom Koordinatensystem i-1 nach i genutzt. Sie wird jeweils durch eine homogene 4×4 Matrix beschrieben(Homogene Matrizen erlauben eine formal einheitliche Darstellung der Transformationen Skalierung, Translation, Rotation durch Matrizenmultiplikation).
Die Matrix besteht aus
:

- einem 3D Positionsvektor r des Ursprungs des Koordinatensystem i bezüglich des Koordinatensystem i-1
- einer 3×3 orthonormalen Rotationsmatrix R, diese beschreibt die Orientierung des Koordinatensystem i bezüglich des Koordinatensystem i-1
Aus dem Produkt der lokalen Transformationsmatrizen erhält man eine Transformationsmatrix der selben Form welche die Verschiebung von der Basis bis zum Endeffektor beschreibt. Hierfür werden zusätzlich kinematische Daten (z.B Abmessungen und mechanische Eigenschaften der Gelenke) benötigt, welche in der Denavit-Hartenberg Konvention angegeben werden.
Liegen einem die Gelenkwinkel vor um die Koordinaten des Endeffektors zu berechnen spricht man von direkter Kinematik.
Im Gegensatz dazu spricht man bei vorliegenden Koordinaten aus denen die Gelenkwinkel berechnet werden von inverser Kinematik.
(Pons, 2008; Spong, Huttchinson, Vidyasagar, 2006)
Das folgende Video enthält eine kurze visuelle Verdeutlichung der Unterschiede zwischen der direkten und der inversen Kinematik.
Ab (0:10) seht ihr wie die Koordinaten des Endeffektors verändert werden, woraufhin sich die Gelenkwinkel anpassen und der Bewegung „folgen“. Dies kann z.B. verwendet werden um mit einem Roboterarm einen Gegenstand am Punkt x aufzunehmen (mit x als 3-dimensionalem Ortsvektor).
Ab (0:48) wird die direkte Kinematik gezeigt. Hier werden die Gelenkwinkel verändert und daraus resultiert eine Position des Endeffektors im Raum.
verfasst von M. Steil
Zusammenfassung und Ausblick
Wir haben euch in diesem Modul eine Einleitung in die sehr große Thematik der Exoskelette gegeben. Ihr hab etwas über den Begriff, die Geschichte sowie das Design von Exoskeletten erfahren, sowie über dessen Material in verschiedenen Anwendungsbereichen. Außerdem solltet ihr die Mensch-Roboter-Schnittstelle verstanden haben, sowie die Unterschiede der geistigen zur körperlichen Mensch-Roboter-Interaktion. Zuletzt wurde euch ein Einblick in die Steuerung eines so komplexen Roboters gegeben.
Die Vision, Menschen mit robotischer Unterstützung übermenschliche Aufgaben lösen zu lassen, ist heutzutage nicht mehr nur eine fiktive Idee aus Büchern oder Filmen, sonder in sehr naher Zukunft Realität. Schnelleres Laufen, höheres Springen oder das Heben von unglaublichen Lasten sind nur die Anfänge der Möglichkeiten, wie Exoskelette uns Menschen in naher Zukunft unterstützen können. Körperliche Behinderungen, wie zum Beispiel der Verlust eines Körperteils oder eine genetisch bedingte Fehlstellung in einem Gelenk, könnten durch Exoskelette ausgeglichen werden, und dadurch den Personen wieder nahezu grenzenlose körperliche Freiheit ermöglichen.
Zwar gibt es heutzutage noch kaum serienreifen Exoskelette, allerdings gibt es schon Prototypen. Diese sind auf heutigem Stand noch nicht perfektioniert und auch sehr teuer, was sich die nächsten Jahre allerdings ändern könnte.
Themenvorschläge für Folge-Wikis
- Genauere Funktionsweise bestimmter Sensoren/Aktoren
- Exoskelette in der Rehabilitation mit ihren spezifischen Anforderungen
- Nähere Bearbeitung der Mensch-Roboter-Schnittstelle
verfasst von S. Albrecht
Fragen
<spoiler | 1. Zwischen welchen zwei Mensch-Roboter-Interaktionen wird unterschieden?> Es wird zwischen der geistigen (cHRI) und der körperlichen (pHRI) unterschieden. </spoiler>
<spoiler | 2. Wie werden Exoskelette klassifiziert?> Exoskelette werden nach ihrer seriellen oder parallelen Anordnung unterschieden. Bei parallelen Exoskeletten wird nochmals an Hand des Funktionsprinzips in Lastentransfer, Drehmomentssteigerung und Erhöhung der Ausdauerleistung unterteilt. </spoiler>
<spoiler | 3. Nenne drei Beispiele für die Anwendung von Exoskeletten in der Prothetik?> Unterschenkelprothesen, Oberschenkelprothesen, Oberarmprothesen, …, Orthesen </spoiler>
Literatur
Bogue, R. (2009). Exoskeletons and robotic prosthetics: a review of recent developments. Industrial Robot: An International Journal, 36 (5), 421-427.
Herr, H. (2009). Exoskeletons and orthoses: classification, design challenges and future directions. Journal of NeuroEngineering and Rehabilitation, 6 (21), doi:10.1186/1743-0003-6-21.
Hong, Y. W., King, Y., Yeo, W., Ting, C., Chuah, Y., Lee, J., Chok, E. (2013). Lower Extremity Exoskeleton: Review and Challenges Surrounding the Technology and its Role in Rehabilitation of Lower Limbs. Australian Journal of Basic and Applied Sciences, 7 (7), 520-524.
Mikolajewska, E., Mikolajewska, D. (2011). Exoskeletons in Neurological Diseases – Current and Potential Future Applications. Advances in Clinical and Experimental Medicine, 20 (2), 227-233.
Paradisi-Redaktion (2016) Einsatzgebiete, Formen und Handhabung unterschiedlicher Prothesen http://www.paradisi.de/Health_und_Ernaehrung/Medikamente/Prothesen/Artikel/22264.php#Fu.DFprothese
Pons, J. L. (2008). Wearable Robots: Biomechatronic Exoskeletons. Chichester: John Wiley & Sons Ltd.
Spong, M. W., Hutchinson, S., Vidyasagar, M. (2006). Robot Modeling Control. Hoboken, New Jersey: John Wiley & Sons
Stormie Garza, Jennifer Cao, and Vijay Vaidyanathan, Ph.D. McNair Scholars Program. Department of Biomedical Engineering, University of North Texas. Design of a Lower Extremity Exoskeleton to Improve Gait in Patients with Knee Osteoarthritis by Reducing Knee Joint Loading.
Wikipedia-Artikel Powered Exoskeleton (2017) https://en.wikipedia.org/wiki/Powered_exoskeleton
Dr. Annika Wellmann-Stühring (2014) 'Material und Form' Aus der Prothetik-Sammlung des Deutschen Hygiene-Museums (Teil 2)
Bewertung des Wiki-Moduls
| Kategorie | Punkte | Anmerkungen |
|---|---|---|
| Inhalt (max. 10) | 8 Pkt | (+) kompakter Inhalt, auf das Wesentliche reduziert (-) kritische Betrachtung wünschenswert, eigener Standpunkt fehlt (-) kein konsequenter roter Faden |
| Form (max. 5) | 4 Pkt | (+) gut strukturiert (-) Abbildungen nicht konsequent zitiert (Abb. 6/7 ?) (-) Subüberschrift identisch mit übergeordneter Überschrift (→ Material) |
| Bonus (max. 2) | 1 Pkt | (+) Multimedialer Inhalt (Bilder, Videos) |
| Summe | 13/15 Pkt | 86,66% |